Preço reduzido
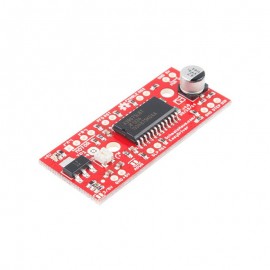
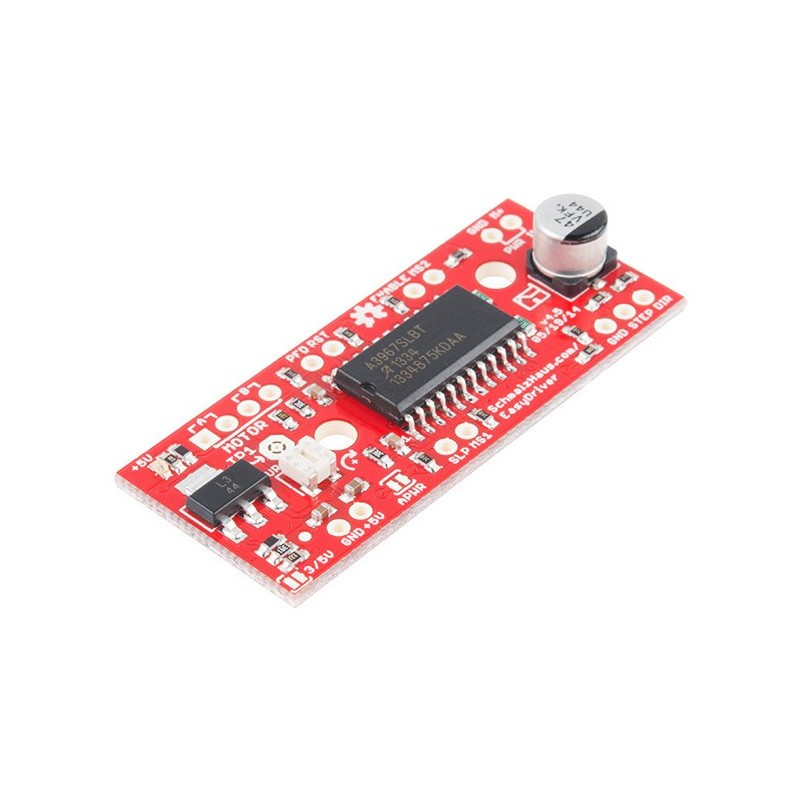
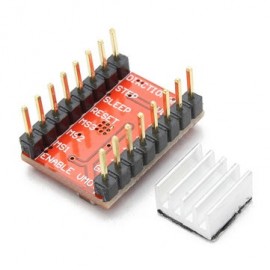
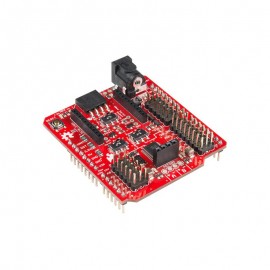
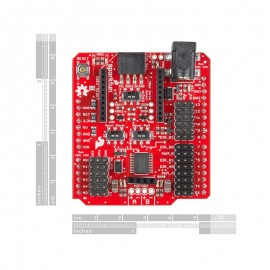
Driver do motor de passo EasyDriver V44
Driver do motor de passo EasyDriver V44
O EasyDriver é um driver de motor de passo simples de usar, compatível com qualquer coisa que possa gerar um pulso digital de 0 a 5 V (ou pulso de 0 a 3,3 V se você soldar SJ2 fechado no EasyDriver). O EasyDriver requer uma alimentação de 7 V a 30 V para alimentar o motor e pode alimentar qualquer tensão de motor de passo. O EasyDriver possui um regulador de tensão integrado para a interface digital que pode ser configurado para 5V ou 3,3V. Conecte um motor de passo de 4 fios e um microcontrolador e você terá um controle de motor de precisão! O EasyDriver aciona motores bipolares e motores com fiação bipolar. Ou seja, 4,6 ou motores de passo de 8 fios. Nesta versão (v4.4), corrigimos o erro de seda no ajuste min / max.Esta é a versão mais recente do EasyDriver V4 co-projetado com Brian Schmalz. Ele oferece muito mais flexibilidade e controle sobre o motor de passo, quando comparado às versões anteriores. Os pinos de seleção de microstep (MS1 e MS2) do A3967 são quebrados permitindo ajustes na resolução de microstep. Os pinos de suspensão e ativação também são quebrados para maior controle.Nota: Não conecte ou desconecte um motor enquanto o driver estiver energizado. Isso causará danos permanentes ao IC A3967.Características:A3967 microstepping driver MS1 e pinos MS2 quebrados para alterar a resolução de microstepping para full, half, quarter e 8th steps (o padrão é oitavo) Compatível com motores de passo de 4, 6 e 8 fios de qualquer tensão. Controle de corrente ajustável de 150mA / fase a 750mA / phasePower faixa de alimentação de 7V a 30V. Quanto maior a tensão, maior o torque em altas velocidadesExemplo:Problema: eu tenho um motor de passo, mas não tenho a pinagem do motor. Como posso determinar como conectar meu motor de passo sem as pinagens?Abordagem 1 (usando um multímetro)Cada uma das duas fases deve ter a mesma resistência quando medida com um multímetro. Ao medir a resistência em um fio de cada uma das duas fases, a resistência deve ser infinita porque o circuito está aberto. Localize os dois pares de fios que representam as duas fases; ambos os pares de fios terão resistência interna semelhante.Conecte cada fase ao amplificador e ignore a polaridade (+ / -), por enquanto. Você tem 50 por cento de chance de acertar.Envie um comando para mover o motor. Se o motor girar na direção errada, troque as fases A e A- ou B e B- (efetivamente invertendo as direções).Código://////////////////////////////////////////////////////// //////////////////// © 2011 bildr // Lançado sob a licença MIT - Reutilize a mudança e compartilhe // Usando o stepper fácil com seu arduino // use girar e / ou rotateDeg para controlar o motor de passo // a velocidade é qualquer número de 0,01 -> 1 com 1 sendo mais rápido - // Velocidade mais lenta == Movimento mais forte //////////////////// ///////////////////////////////////////////////// # define DIR_PIN 2 # definir STEP_PIN 3void setup () {pinMode (DIR_PIN, OUTPUT); pinMode (STEP_PIN, OUTPUT); } void loop () {// rotaciona um número específico de graus rotateDeg (360, 1); atraso (1000); rotateDeg (-360, .1); // atraso reverso (1000); // girar um número específico de microsteps (8 microsteps por etapa) // um stepper de 200 passos levaria 1600 micro passos para uma rotação completa rotate (1600, 0,5); atraso (1000); girar (-1600, 0,25); // atraso reverso (1000); } void rotate (int steps, float speed) {// rotacionar um número específico de microsteps (8 microsteps por step) - (negativo para movimento reverso) // a velocidade é qualquer número de 0,01 -> 1 com 1 sendo mais rápido - Mais lento é mais forte int dir = (etapas> 0)? ALTO: BAIXO; etapas = abs (etapas); digitalWrite (DIR_PIN, dir); float usDelay = (1 / velocidade) * 70; para (int i = 0; i <etapas; i ++) {digitalWrite (STEP_PIN, HIGH); delayMicroseconds (usDelay); digitalWrite (STEP_PIN, LOW); delayMicroseconds (usDelay); }} void rotateDeg (float deg, float speed) {// girar um número específico de graus (negativo para movimento reverso) // a velocidade é qualquer número de .01 -> 1 com 1 sendo mais rápido - Mais lento é mais forte int dir = ( deg> 0)? ALTO: BAIXO; digitalWrite (DIR_PIN, dir); passos int = abs (deg) * (1 / 0,225); float usDelay = (1 / velocidade) * 70; para (int i = 0; i <etapas; i ++) {digitalWrite (STEP_PIN, HIGH); delayMicroseconds (usDelay); digitalWrite (STEP_PIN, LOW); delayMicroseconds (usDelay); }}
Inclui:
• 1x Driver do motor de passo EasyDriver V44
Clientes também compraram:


-15%
Disponível Loja Gaia e Online (Envio 24h)
Preço
8,69 €
Preço
10,22 €
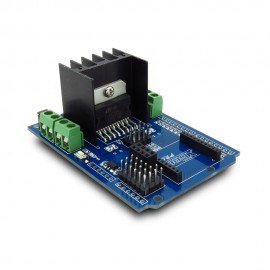
Com este Driver L298M Ponte H é possível controlar independentemente a velocidade e rotação de 2 motores DC ou 1 motor de passo.


-15%
Disponível Loja Gaia e Online (Envio 24h)
Preço
8,44 €
Preço
9,93 €
O Motor Shield L293D integra alta tensão, alta corrente e controlo de 4 canais numa só placa.

-15%
Não há produtos suficientes em stock
Preço
3,58 €
Preço
4,22 €
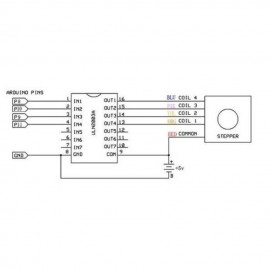
O Driver ULN2003 é um driver de corrente que permite ao Arduino controlar os motores com correntes superiores a 50mA, neste caso até 500mA.
-15%
Disponível Loja Gaia e Online (Envio 24h)
Preço
8,25 €
Preço
9,70 €
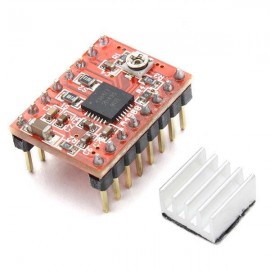
Driver Motor de Passo A4988 para Impressoras 3D com dissipador térmico.

-15%
Disponível Loja Gaia e Online (Envio 24h)
Preço
19,54 €
Preço
22,98 €
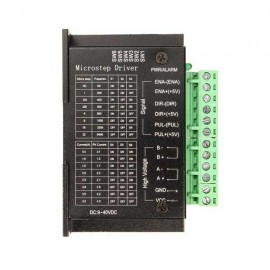
Driver Motor de Passo TB6600 4A CNC 32 Segmentos 42V 42/57/86.
4 outros produtos na mesma categoria:


-15%
Disponível Loja Gaia e Online (Envio 24h)
Preço
25,97 €
Preço
30,55 €

-15%
Disponível Loja Gaia e Online (Envio 24h)
Preço
32,29 €
Preço
37,99 €
-15%
Disponível Loja Gaia e Online (Envio 24h)
Preço
28,91 €
Preço
34,01 €
Proteção do driver do motor sem fio SparkFun

-15%
Não há produtos suficientes em stock
Preço
14,63 €
Preço
17,21 €
MotoMama é um Shield para Arduino controlador de dois motores 2A baseado no L298N Ponte H.
Driver do motor de passo EasyDriver V44