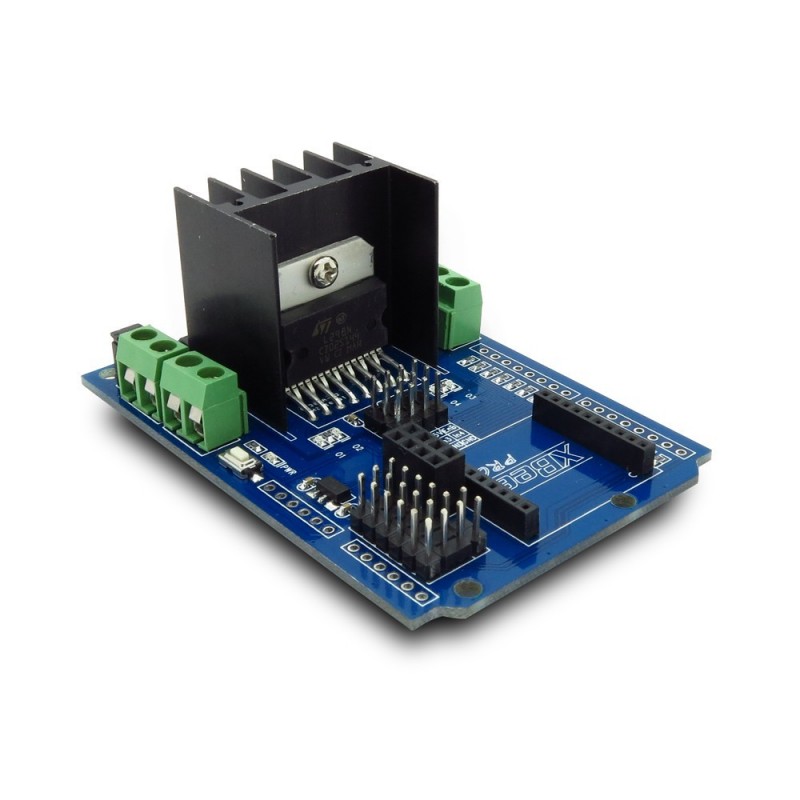
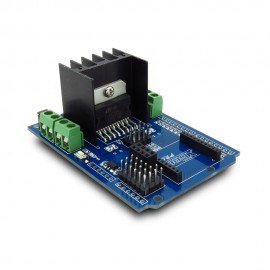
Pode utilizar este Motor Shield para conduzir dois motores DC ou motores de passo. Para fonte de alimentação, existe um terminal de alimentação na própria placa que alimentará a placa Arduino. Ou através da tomada de energia na placa do Arduino.
Em muitos projetos de robótica, necessita utilizar comunicação sem fios, portanto na placa terá uma área de Wi-Fi. Pode também colocar diretamente um XBee (ou outros módulos compatíveis) e um módulo nRF24l01 na placa.


Características:
• Tensão de Funcionamento: 5V;
• Compatibilidade: Arduino UNO, Arduino MEGA, Arduino Deumlanove, Iteaduino, Iteaduino ADK, Iteaduino BT, Iteaduino MEGA 2560, Seeeduino, Seeduino MEGA;
• Dimensões da placa: 100mm x 54mm;
• Peso: 60g.
Para mais informações técnicas clique aqui.
Inclui:
• 1x MotoMama Motor Shield para Arduino L298N Ponte H.
Esquema de Ligação:

Código Exemplo:
int IN1 = 4;
int IN2 = 5;
int IN3 = 6;
int IN4 = 7;
void setup()
{
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop()
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
delay(2000);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
delay(500);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(2000);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
delay(500);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
delay(2000);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
delay(500);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(2000);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
delay(500);
}