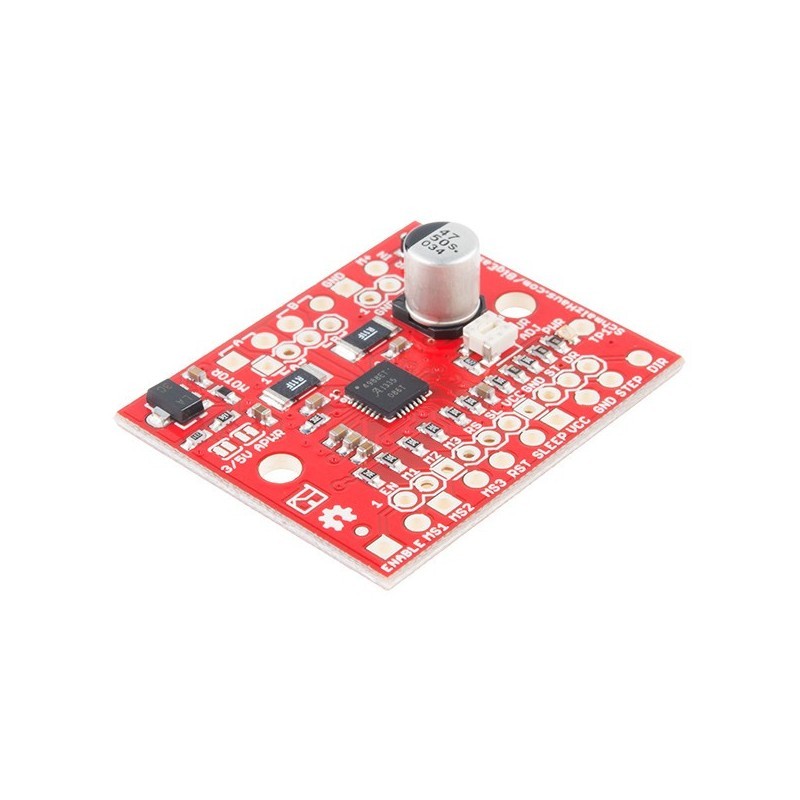
Big Easy Driver
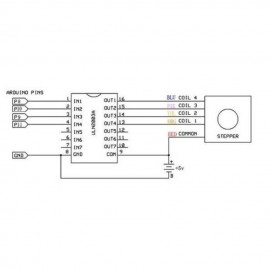
Desenhado por Brian Schmalz,Cada BigEasyDriver pode acionar até cerca de 2A por fase de um motor de passo bipolar. É um driver de micropasso de corte que tem como padrão o modo de micropasso de 16 etapas. Ele pode suportar uma tensão máxima de acionamento do motor de cerca de 35 V e inclui regulação de 5 V / 3,3 V on-board, portanto, apenas uma alimentação é necessária. Embora esta placa deva ser capaz de operar a maioria dos sistemas sem resfriamento ativo, um dissipador de calor é recomendado para cargas próximas a 2A / fase. Você pode encontrar o dissipador de calor recomendado nos itens relacionados abaixo.Nota: Este produto é uma colaboração com Brian Schmalz. Uma parte de cada venda volta para ele para suporte ao produto e desenvolvimento contínuo.Características:Driver Microstepping Bi-polar2A / Fase Máx.1,4-1,7 A / Fase sem dissipador de calorTensão máxima de acionamento do motor: 30VRegulagem de 5V / 3,3V a bordoDocumentos:EsquemáticoArquivos EagleFolha de Dados (A4983)Site de DesignBiblioteca:Baixe a biblioteca AccelStepperConectando-oEmbora haja cerca de 30 pinos no Big Easy Driver, precisamos apenas de alguns para colocá-lo em funcionamento. Na verdade, muitos dos pinos são, na verdade, apenas duplicatas espaçadas de maneira diferente.A configuração de barebones:Alimente o driver com 8-35v - Se estiver usando um adaptador de parede, certifique-se de que o adaptador tenha pelo menos corrente suficiente para o motor. Uma classificação de corrente / amperagem mais alta é melhor e apenas significa que não vai queimar. (O Big Easy Driver pode fornecer até 2 amperes) Conecte os 3 fios de controle do "gnd", "dir" e "step" do Big Easy Driver ao Arduino como mostrado. Conecte o motor de passo ao driver - Para mim, o vermelho / verde eram um par e o azul / amarelo era outro. Se isso não funcionar para você, consulte a seção abaixo sobre como encontrar os pares de bobinas do seu motor.CódigoPara o código do arduino para o driver, vou usar a Biblioteca AccelStepper. Esta é uma biblioteca incrível que eu uso para todas as minhas necessidades de stepper agora. Ele ainda faz aceleração e desaceleração, oferece suporte a vários drivers ao mesmo tempo e, o mais importante, não bloqueia. Ou seja, você pode mover seu motor enquanto lê um sensor ou acender as luzes, etc.A biblioteca ainda mantém registro da posição do motor. Portanto, se você disser para ele ir para 10.000 - ele sabe que já está às 9.00, então ele se move 1.000 passos adicionais. Então você pode dizer para ele ir para casa e ele voltará 10.000 passos até 0.Informação adicional:Encontrando seus pares de bobinas de motoresEste driver só precisa de 4 fios de seu stepper. Se você tem um stepper de 4 fios, ótimo! Se você tiver um passo de 6 fios, será um pouco mais complicado. Mas não importa o que aconteça, precisamos encontrar as 2 bobinas principais dentro do motor. E se você errar, o motor só vai se contorcer ou não se mover, mas você não vai quebrá-lo.Motor de 4 fiosUsando um ohmímetro, escolha um fio aleatoriamente e teste-o com os outros até encontrar um par que mostre resistência de alguns ohms (1 - 200 ohms na maioria das vezes). Esses 2 são o seu “par A”. Certifique-se de que os outros 2 fios tenham a mesma resistência (se não, pode estar quebrado) e esse é o seu “par B”. Com os dois pares de fios, não há um reverso, então apenas conecte os fios do “par A” no “A” do driver e “par B” no “B”.Motor de 6 fiosVerificar os documentos do motor é o mais fácil, mas se você não tiver, continue lendo.Os motores de 6 fios têm duas bobinas, assim como os motores de 4 fios. Mas os motores de 6 fios também têm fios extras que se conectam ao meio de cada bobina (centros). Então, cada bobina tem na verdade 3 fios, um centro e duas pontas. Não usamos fios centrais da bobina, precisamos apenas das 4 extremidades da bobina (2 de cada bobina).Basicamente, precisamos encontrar as pontas das duas bobinas. As pontas das bobinas terão o dobro da resistência do centro de uma ponta. Portanto, precisamos de dois pares de fios com a maior resistência do grupo.A maneira mais fácil de encontrar os 4 fios corretos é consultar a documentação do motor, mas se você não tiver, poderá, com alguns testes, encontrar os corretos.Para encontrar os 2 fios corretos, precisamos localizar os 3 fios de cada bobina. Comece escolhendo apenas um ao acaso e, usando um ohmímetro, teste a resistência com os outros até encontrar o 2 conectado a esse fio. (3 deles não mostrarão nenhuma conexão porque fazem parte da outra bobina). Agora, esses 3 são para a bobina “A”. Agora, pegue esses 3 fios e teste a resistência entre quaisquer 2 deles até encontrar os 2 que têm a maior resistência. Estas são as duas extremidades da bobina “A”. Faça o mesmo para os outros 3 fios para localizar as pontas da bobina “B”.Com os dois pares de fios, não há reverso. Portanto, basta conectar os fios da bobina A no A do driver e os dois da bobina B em b.Motor de 8 fiosNão há como fazer isso sem consultar a documentação.MicrosteppingA maioria dos drivers de passo oferece algo chamado microstepping, e o Big Easy Driver não é exceção. Como mencionei antes, os steppers têm aquele movimento mínimo chamado degrau. Microstepping divide essa etapa em micro etapas menores. O microstepping permite um controle mais suave, silencioso e preciso em velocidades mais lentas.Ao usar microstepping, um motor de passo exigirá mais "passo positivo" para mover o motor. Por exemplo, se você estiver usando 16 microsteps (o padrão no Big Easy Driver) por etapa, um motor de 200 etapas exigiria 3200 “etapas mais” para fazer uma revolução completa. Apenas observe quando você se perguntar por que dizer para dar passos 200 mal faz o motor girar.Microstepping irá reduzir a velocidade / torque máximo do motor (cerca de 30% menos), então é uma troca de velocidade versus suavidade. Por causa disso, muitos drivers de ponta mudam para full stepping (sem microstepping) em velocidades mais altas e, tecnicamente, você poderia fazer isso com o grande easyDriver, mas é muito complexo para eu descobrir, então não vou abordar isso.Ajustando o microsteppingO padrão do Big Easy Driver é o modo de micropasso de 16 etapas. Se você quiser reduzir isso, pode fazer isso puxando os pinos MS1, MS2 e MS3 HIGH (conectando-os a 5V) ou LOW (conectando-os ao GND). Confira o gráfico abaixo para ver como fazer os ajustes.
Inclui:
• 1x Big Easy Driver