Robot com Camara ESP-32 CAM
Neste artigo iremos elaborar um Robot controlado por WiFi que seja capaz de:
- Efetuar Stream de video para o seu telemóvel;
- Capaz de identificar objetos que estejam próximos;
- Capaz de seguir um objeto indicado pelo utilizador.

Para elaborar este projeto iremos precisar dos seguintes artigos:
| Imagem | Produto | Comprar |
|---|---|---|
|
|
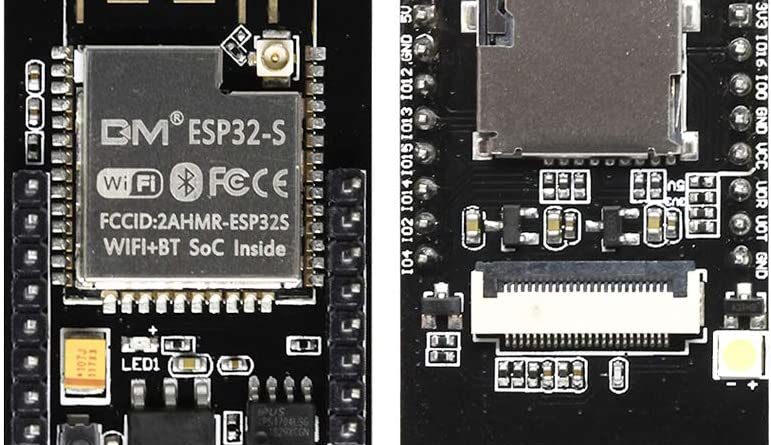
Esp32-Cam |
|
|
|
Conversor FTDI Para TTL |
|
|
|
Kit Carrinho Robot |
|
|
|
Bateria 18650 |
|
|
|
Driver Motor DC L298N |
|
|
|
Fonte De Alimentação |
|
|
|
Servo Motor 180º |
|
|
|
Suporte Pan e Tilt |
|
|
|
Cabos Jumper Macho-Macho |
|
|
|
Cabos Jumper Macho-Fêmea |
|
|
|
Cabos Jumper Fêmea-Fêmea |








Esquema de Ligação – Programação
Sendo que o ESP32-CAM não possui nenhuma entrada USB é necessário utilizar um conversor FTDI para TTL para que seja possível carregar o código no controlador. Como alternativa pode utilizar um Arduino como ISP para carregar o seu código.


Ter em atenção que o pin D01 está conectado ao GND, isto faz com que a placa entre em modo de programação, caso remova esta conexão a placa entrará em modo de execução não sendo
possível fazer upload do código.
Preparar IDE
Sendo que o ESP32 não é uma placa nativa do Arduino IDE, é necessário que seja instalada manualmente. Com o Arduino instalado teremos de acrescentar o seguinte endereço no menu de preferências (control
+ ,):
https://dl.espressif.com/dl/package_esp32_index.json

De seguida, é necessário transferir as placas para o seu IDE:
- Aceder Ferramentas – Placa – Gerenciador de Placas;
- Pesquisar por ESP32;
- Carregar em Instalar.

de Placas
Carregar Código
O código utilizado no neste artigo pode ser obtido aqui. Ter apenas em atenção as seguintes linhas:
const char* ssid = "p4f"; // <<< change this as yours const char* password = "roboticslearner"; // <<< change this as
Precisam de ser respetivamente alteradas para coincidir com os dados da sua rede:
- ssid – Nome da Rede
- password – Palavra passe da Rede
Para efetuar o upload do código deverá obedecer as ligações previamente descritas, selecionar a porta COM correspondente ao seu ESP32 e carregar o código.
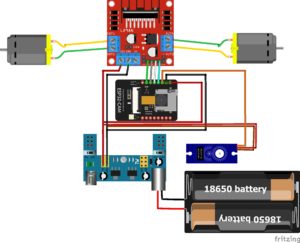
Montagem do Robot
Sendo que o chassi utilizado nesta montagem não possui predefinição de montagem, cabe ao leitor decidir a forma que mais lhe agradar, contudo deverá obedecer ao seguinte esquema de montagem para garantir o bom funcionamento do robot.
App Controlar Robot para controlar o seu robot deverá transferir esta aplicação.
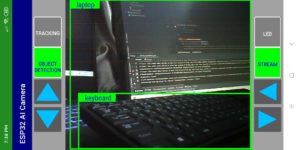
Ambiente da App:
- 4 Botões de Direção – Controlar movimentos do robot;
- Stream – Ligar/Desligar a stream de video;
- LED – Ligar/Desligar Flash;
- Object Detection – Ativar/Desativar a deteção de objetos;
- Tracking – Ativa/Desativa o seguimento de objetos;
- O ecrã esta dividido em 2 partes:
- Parte Superior – Servo movimenta-se para cima;
- Parte Inferior – Servo movimenta-se para baixo.
Relembramos que esta aplicação é código aberto, o que torna possível que elabore as alterações e/ou adicione mais sensores ao seu robot.
Para mais projetos, percorram o nosso blog, onde podem encontrar vários artigos interessantes relacionados com eletrónica, robótica e muito mais! Visitem também o nosso site, onde encontram tudo para eletrónica e robótica!