Curso Robótica – #3 – Construção Mecânica
Depois de se familiarizar com o equipamento da shield discutido anteriormente, é hora de cuidar da segunda parte fundamental deste projeto. Desta vez, o robot ficará sobre as suas (três) rodas.
A construção de uma estrutura mecânica é o último passo antes da programação do robot, que é o mais importante durante esta série de artigos.
Etapa 1: montagem e bateria do Arduino
No início, os separadores às quais o Arduino será montado serão ajustadas. Eles também serão necessários para segurar a bateria no lugar.
Para este fim, precisamos:
- 1x chassis de contraplacado,
- Separadores 6x 10 mm,
- 6x parafuso 6 mm,
- Anilha 6x M3,
- 6x Anilha elástica M3
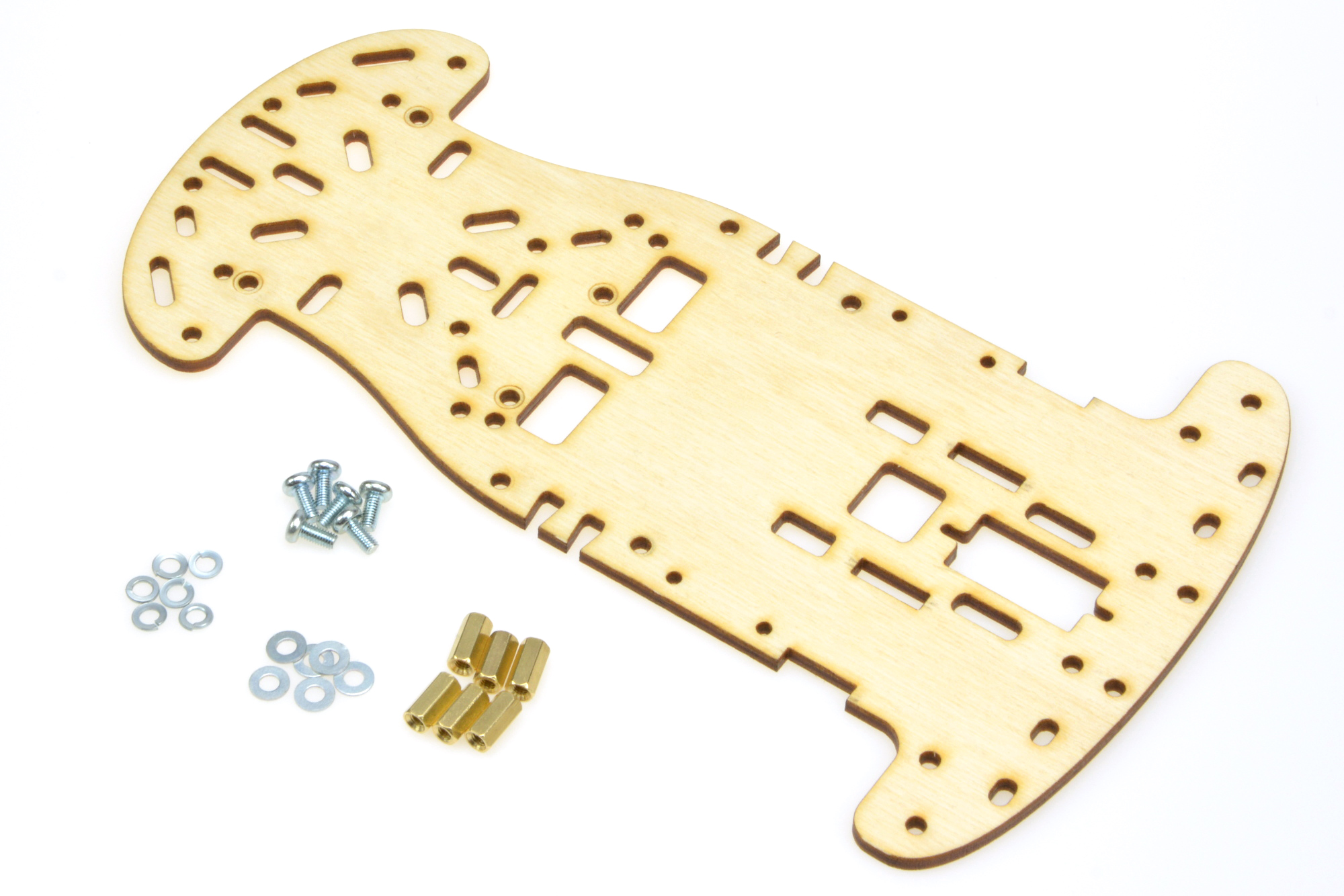
Anilhas elásticas têm uma forma irregular, que é alinhada depois de serem firmemente comprimidas. Essas anilhas fazem com que o robot não seja instável, por exemplo, sob a influência de vibrações.

No início, uma anilha de pressão deve ser aplicada a cada parafuso:

Seguindo a ilustração acima, 6 parafusos com anilhas devem ser preparados:

De seguida, coloque-os da parte inferior nos orifícios apropriados (mostrados na figura abaixo) e, de seguida, a partir do topo, aparafuse aos separadores. É o suficiente apertar os parafusos com a mão, não há necessidade de fazer muito com uma chave de fenda.

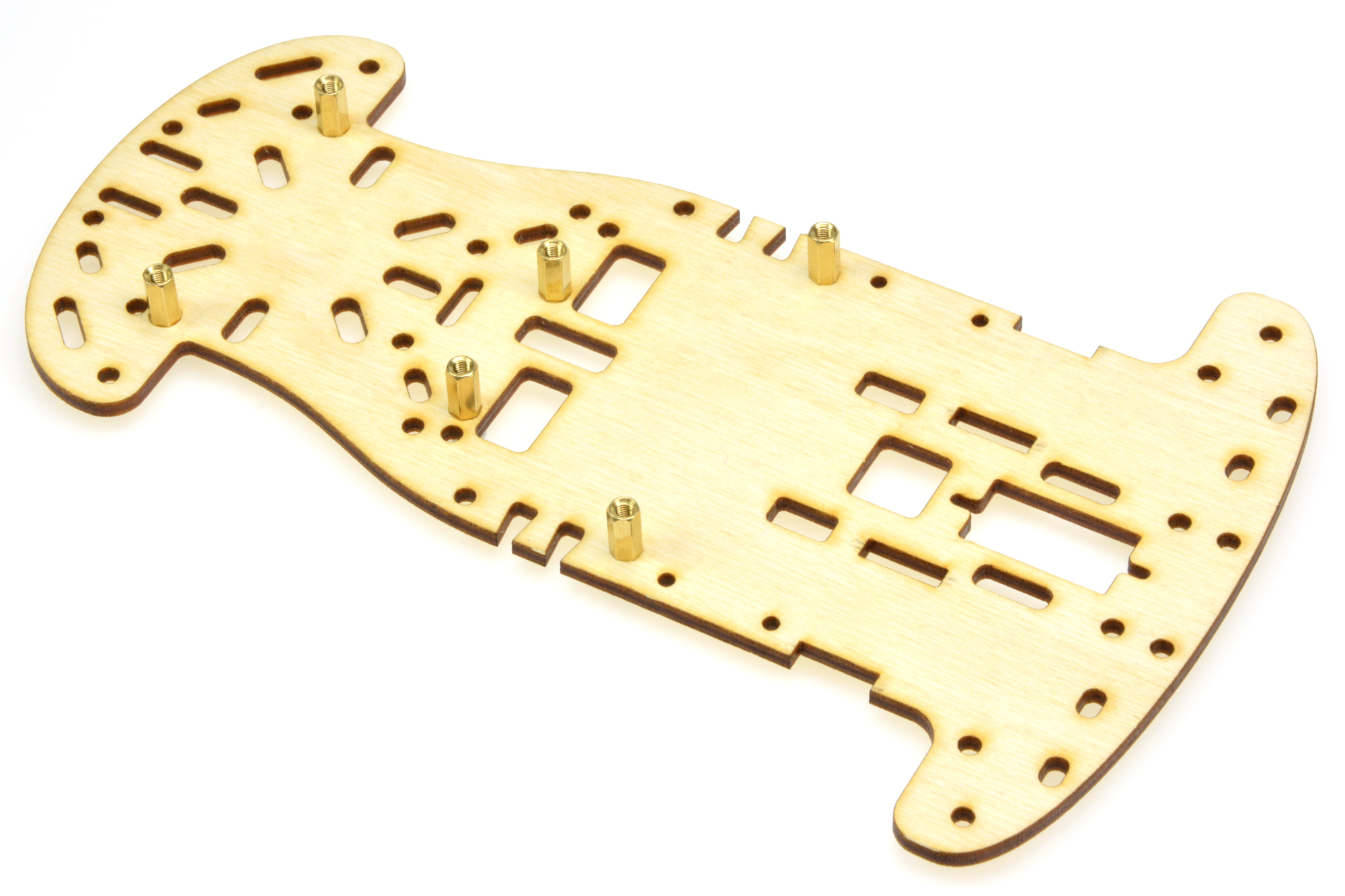
Para facilitar a identificação dos 4 lugares sob os espaçamentos nas quais o Arduino será colocado, esses furos também foram marcados.

Etapa 2: montagem de motores
Durante este curso, vamos instalar os dois motores. As suas ligações são bastante frágeis. Vale a pena manuseá-los suavemente para não quebrar os fios. Neste caso, será necessário soldá-los novamente – então o nosso curso de soldagem pode ser útil.
Vamos começar com o primeiro motor. Para este fim, você precisará de:
- 1x motor
- 1 ficha verde para o motor,
- 2x um pequeno elemento feito de madeira compensada,
- 2x parafuso M3 com um comprimento de 30 mm,
- 2x porca M3.
Antes de instalar o motor, coloque uma ficha nas extremidades de seus cabos, que depois serão inseridos na shield. Realizamos a operação da mesma forma que na parte anterior do curso, quando fixamos os fios na bateria.
Tem que se lembrar de colocar o cabo no lugar certo da ficha:

Cuidado! Insira apenas a parte isolada do cabo dentro do conector!

Desta vez, não precisamos de nos preocupar com a ordem em que o cabo é colocado na ficha. Pode fazê-lo livremente.
Para continuar, o seguinte conjunto de elementos é necessário:
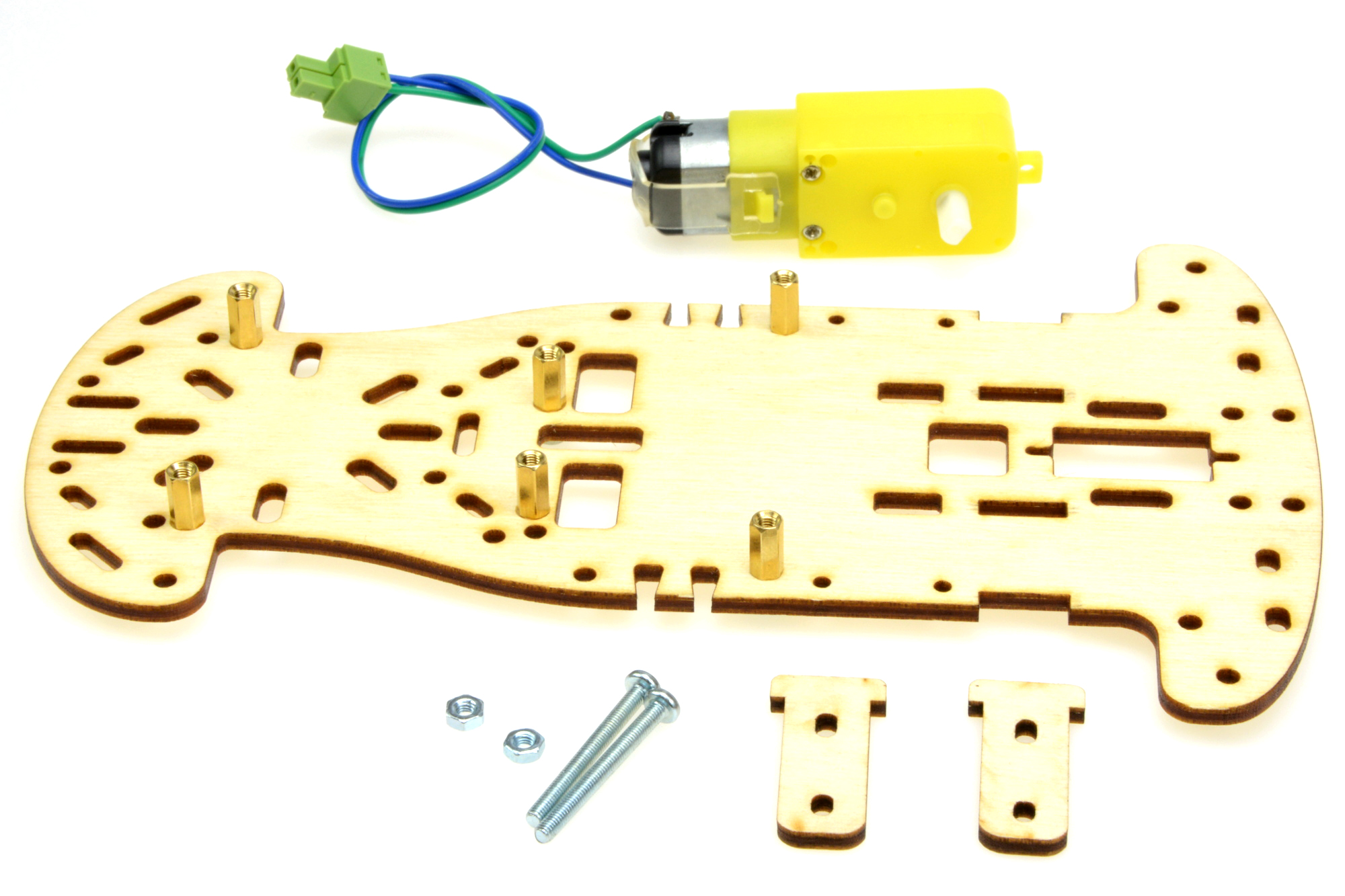
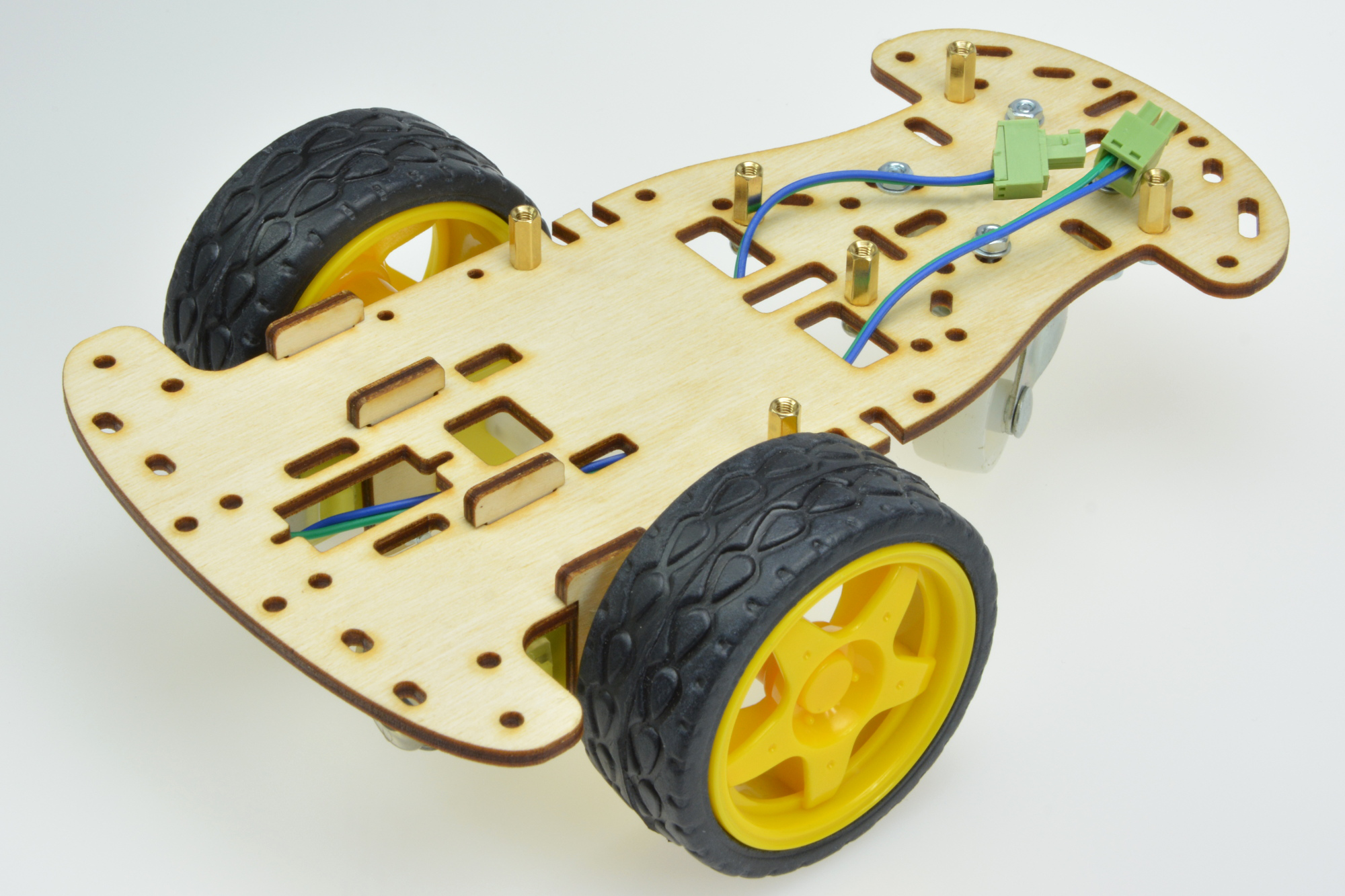
A montagem do motor consiste em transferir os “cogumelos” do chassi para o outro lado da tábua e revirar o conjunto com o uso dos parafusos compridos incluídos no conjunto. As fotos abaixo ilustram o todo.
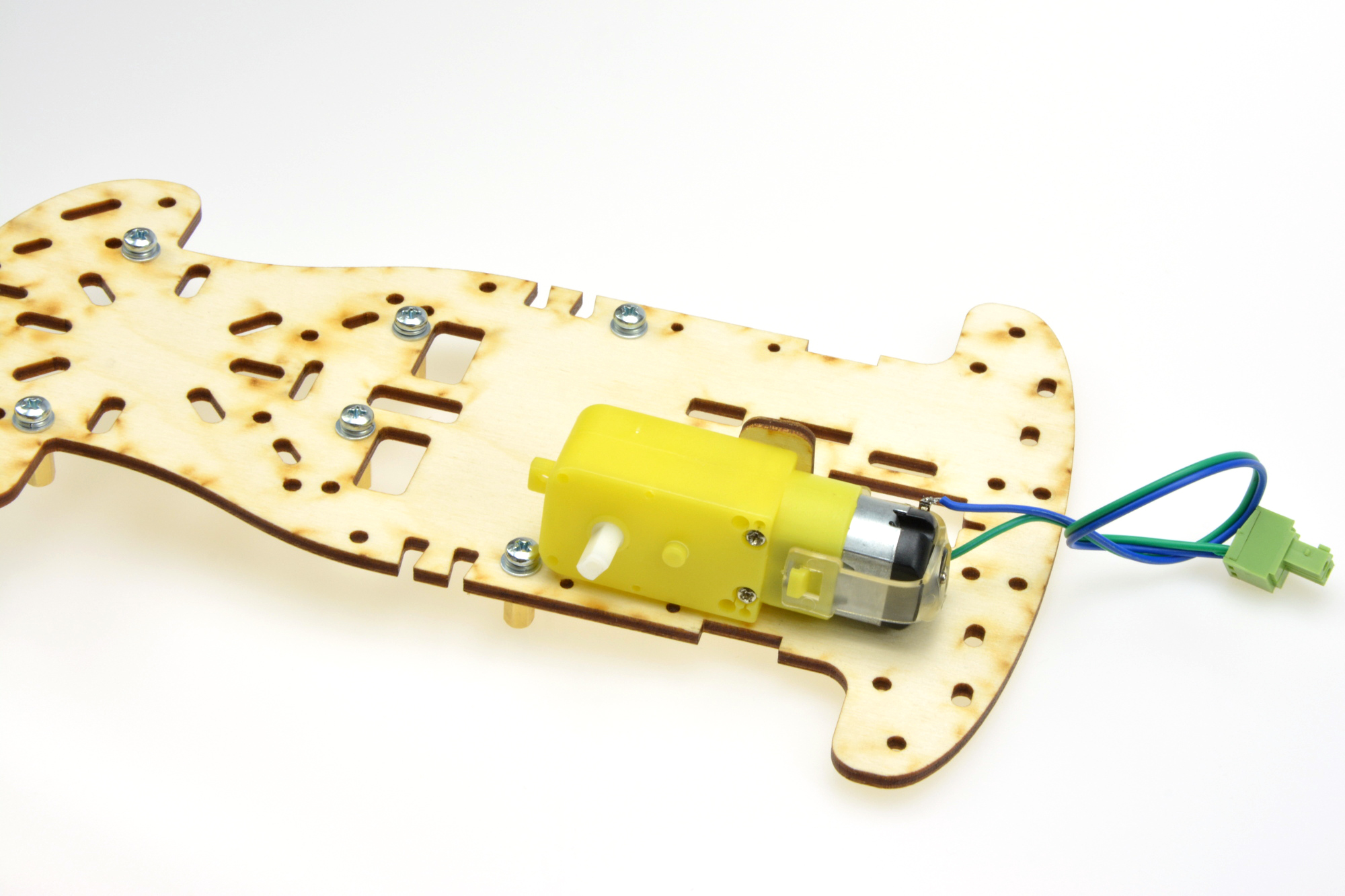

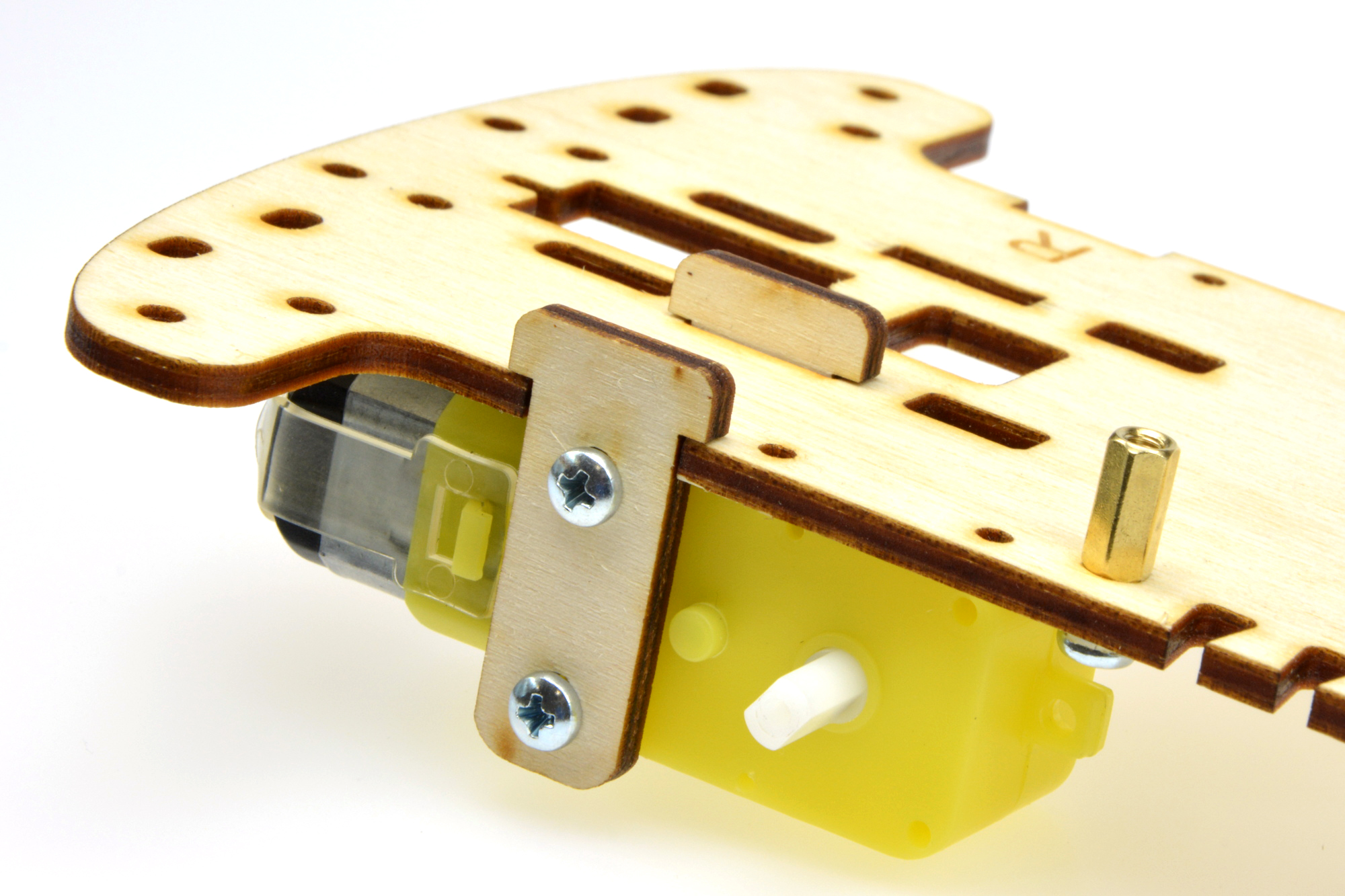
Por favor, note que os motores devem estar no lado oposto
às distâncias previamente instaladas.
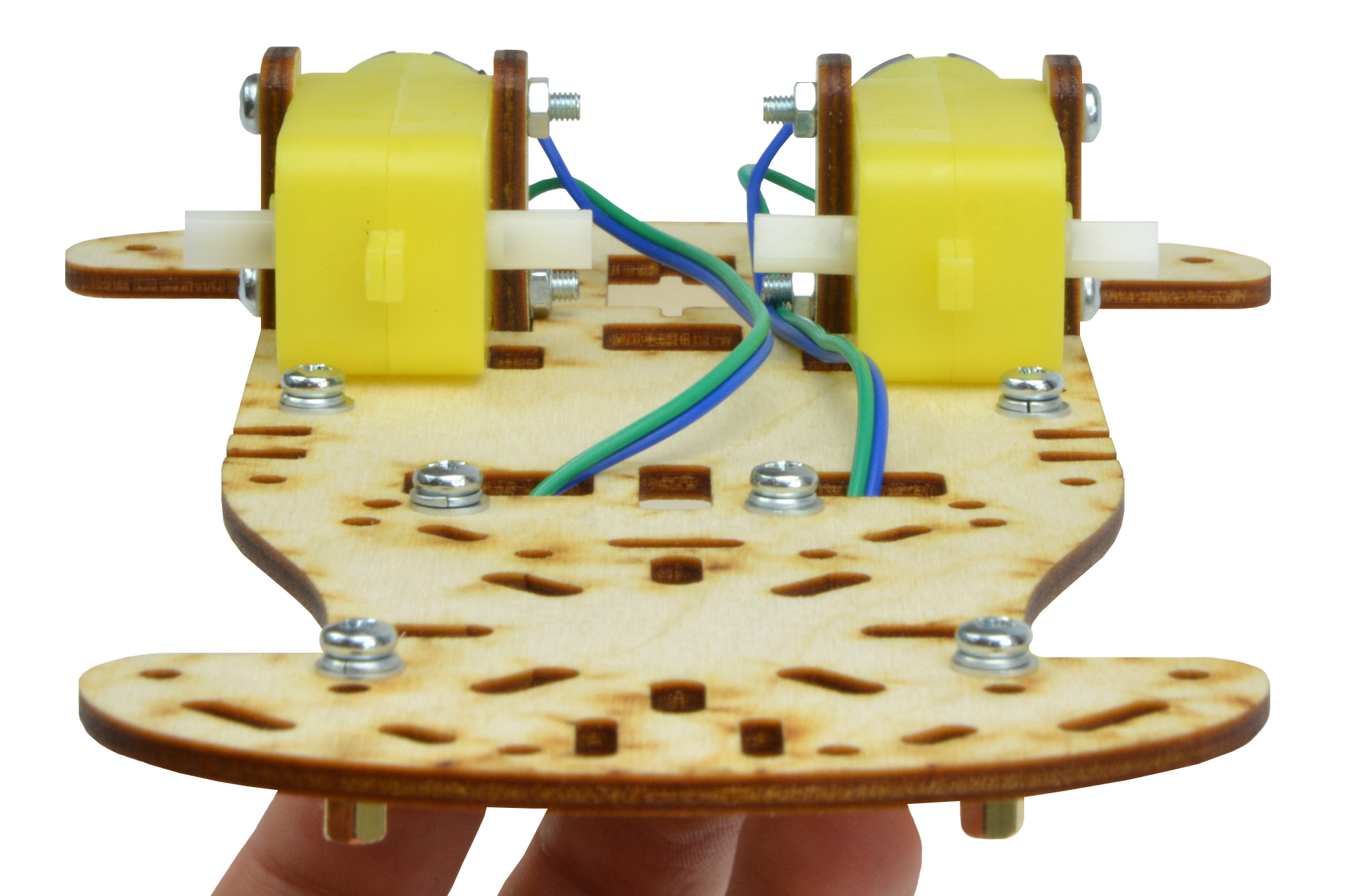
A operação é repetida da mesma maneira para o segundo motor. Numa última análise, após essa etapa, deve ficar assim:

Etapa 3: Preparação do terceiro ponto de apoio
O nosso robot sempre suportará 3 pontos. Dois deles são rodas de borracha que serão anexadas aos motores. O terceiro ponto que nos dará equilíbrio é uma roda livre que pode girar em qualquer direção – um mecanismo conhecido dos carrinhos de compras.
Desta vez você vai precisar de:
- 1 roda livre,
- Lavadora de 8x,
- Anilhas de pressão 4x
- 4 parafusos M3 com um comprimento de 20 mm,
- 4x separadores M3 com um comprimento de 10 mm.

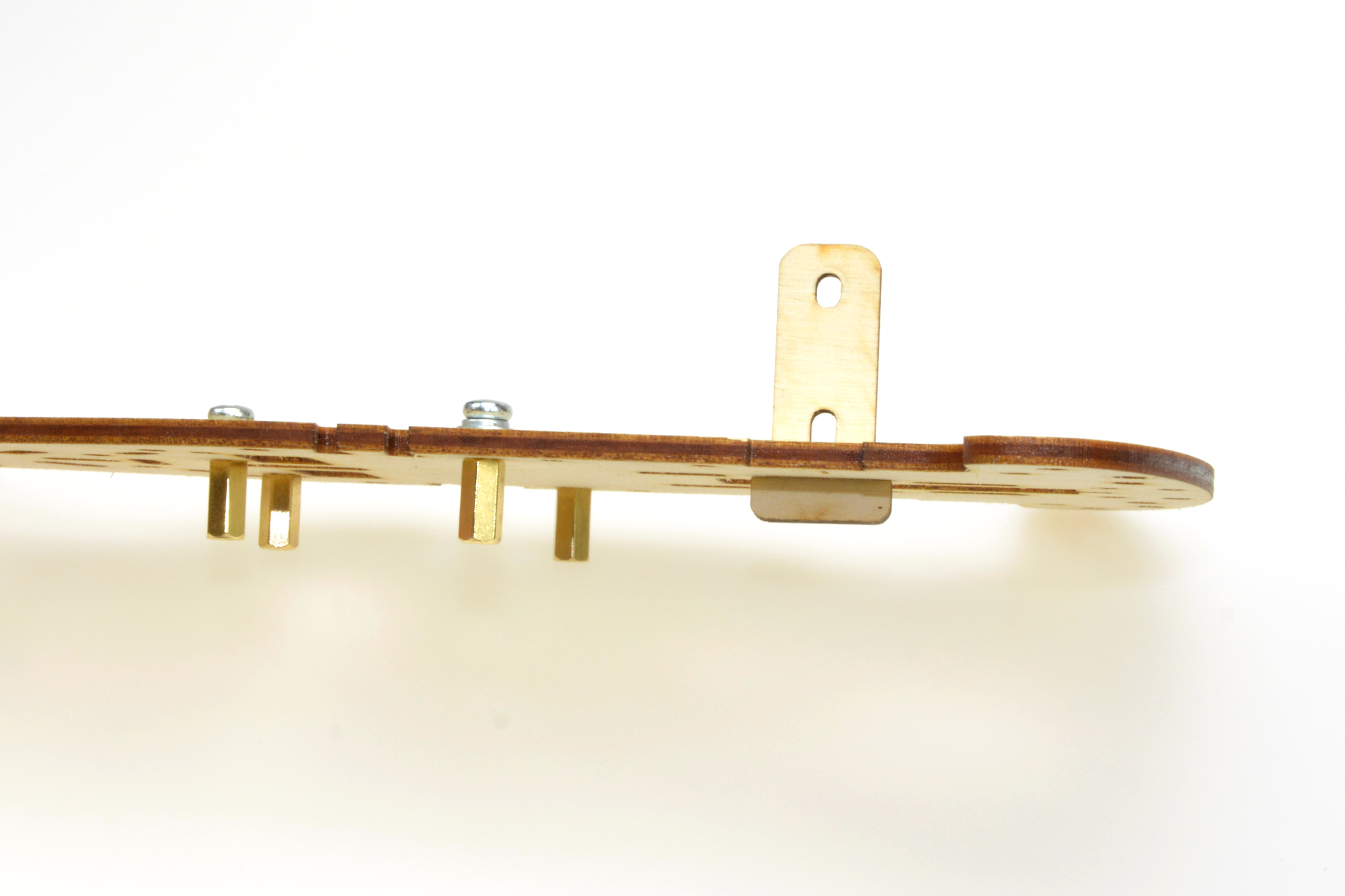
Em cada canto da base da roda livre, faça uma combinação que consiste em: um parafuso, uma anilha de pressão, uma anilha lisa, uma base de roda, uma anilha simples e um separador. Visível na imagem abaixo:

Como resultado, devemos obter uma roda com as seguintes fixações:


Etapa 4: Colocando o robot “sobre rodas”
No começo vale a pena aparafusar a roda livre. Para este fim, você precisará de:
- 1 roda livre previamente preparada com 4 acessórios,
- 8x anilhas M3,
- Porca 4x M3.
Na roda livre previamente preparada, colocamos 4 anilhas:

De seguida, coloque o conjunto (do fundo) nas aberturas longitudinais. Dependendo do modelo de roda específico, ele pode caber em diferentes furos. Com certeza, no entanto, todos os 4 parafusos devem ir para o outro lado da madeira compensada.
Colocamos as anilhas seguintes nos parafusos assim colocados:


O próximo passo é pressionar os eixos das rodas dos motores, o que não requer muita força. Após esta operação, deve ter a seguinte aparência:
As rodas não devem ser pressionadas contra a extremidade dos eixos do motor! É necessário deixar um
pequeno espaço para evitar que as rodas se esfreguem contra o quadro de madeira compensada!

Vista da parte inferior de toda a estrutura:

Etapa 5: Montando a bateria
O penúltimo passo é a montagem do cesto com baterias, os elementos necessários:
- 1x cesto com 6 pilhas AA
- 1 elemento de madeira compensada,
- 2x parafuso M3 com um comprimento de 30 mm,
- 2x anilha lisa M3.
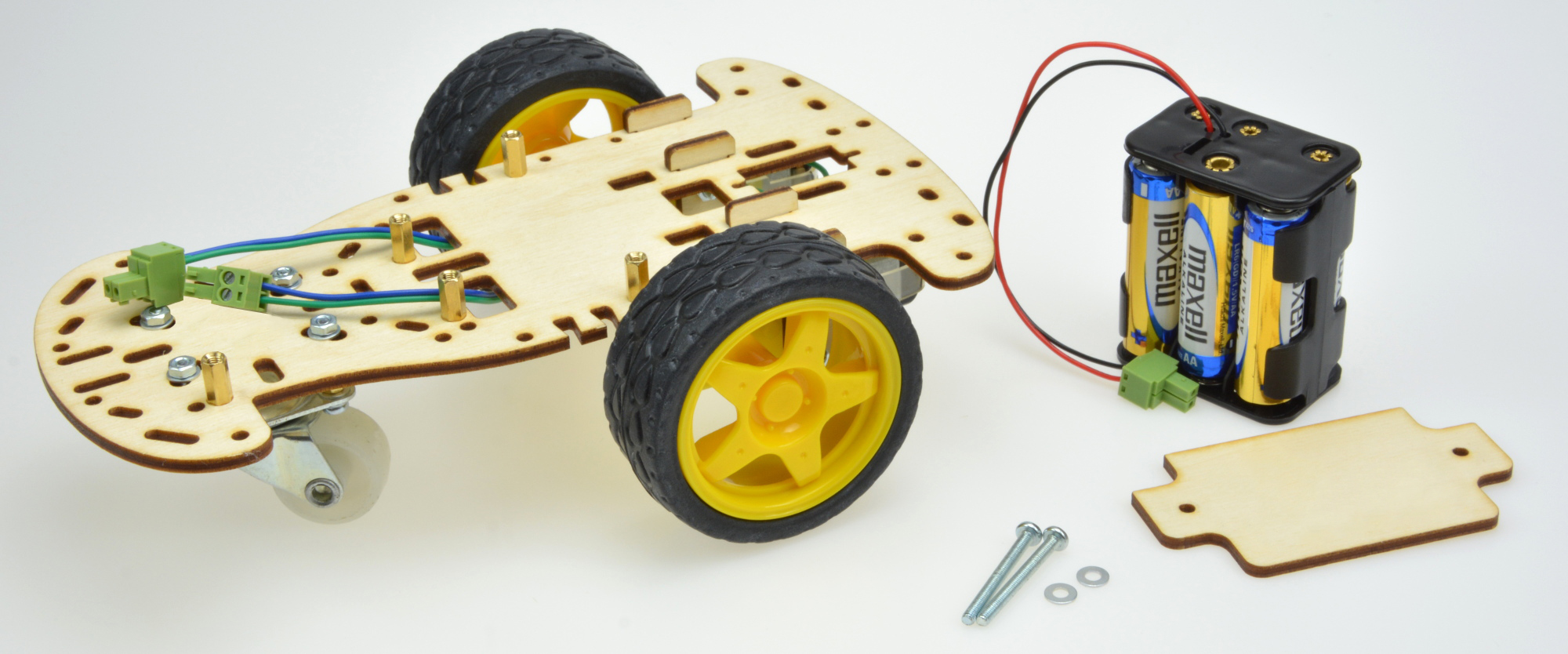
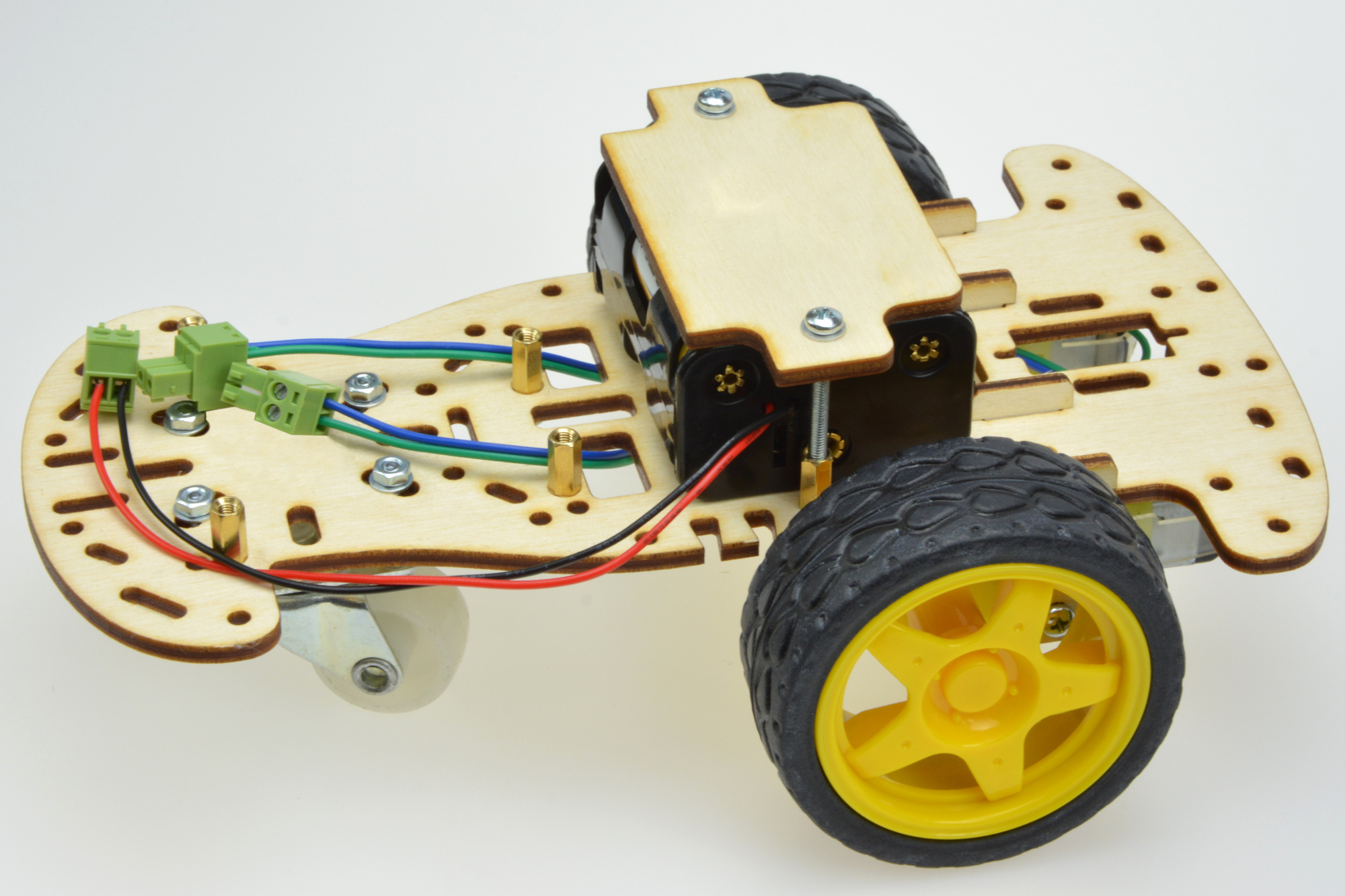
A cesta com baterias deve ser colocada no robot e, de seguida, uma peça adicional de compensado deve ser parafusada de cima. Cuidado! Nós aparafusamos gentilmente, para que o cesto com as pilhas não fique solto. No entanto, não há necessidade de baixá-lo com força.
Os parafusos de fixação devem entrar nos separadores
que já foram anexadas durante o primeiro passo desta instrução.

Etapa 7: montagem do Arduino
O último passo na montagem da parte mecânica é a montagem do Arduino e do nosso escudo. Para este fim, você precisará de:
- 1x Arduino,
- 3x parafuso M3 com um comprimento de 6 mm.

É importante posicionar corretamente os fios, os da fonte de alimentação devem estar localizados sob nossa placa Arduino. No entanto, os outros (de motores) podem ser postos de lado temporariamente.


Arduino aparafusar apenas 3 parafusos – não usamos o furo ao lado do conector USB. Infelizmente, esta placa têm muito pouco espaço para um parafuso ali, então será mais conveniente saltar este buraco. É suficiente que o Arduino resista neste lugar à distância.
Finalmente, use a nossa shield e conecte os fios:

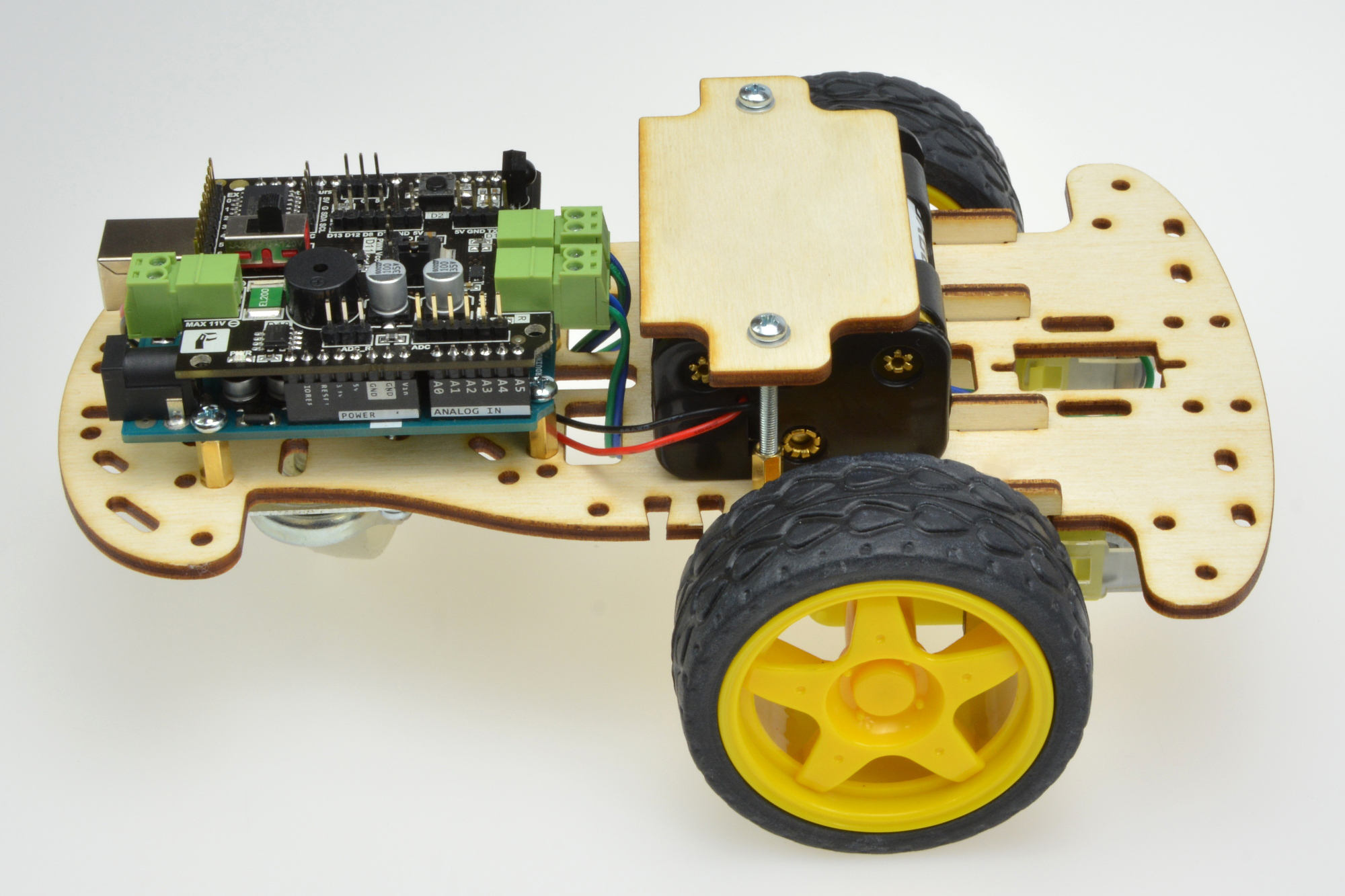
Etapa 8: Pronto!
A parte mais importante da mecânica do nosso robot está pronta. Durante os próximos artigos, vamos expandi-lo adicionando sensores apropriados. No momento, toda a estrutura deve ficar assim:

Sumário
Na próxima parte do curso de construção de robots, vamos escrever o primeiro programa que irá animar o robot. No começo sem sensores – cuidaremos da rota programada. Esta será uma introdução ao desenvolvimento de algoritmos mais avançados.