Descrição em Português Brevemente Disponível.
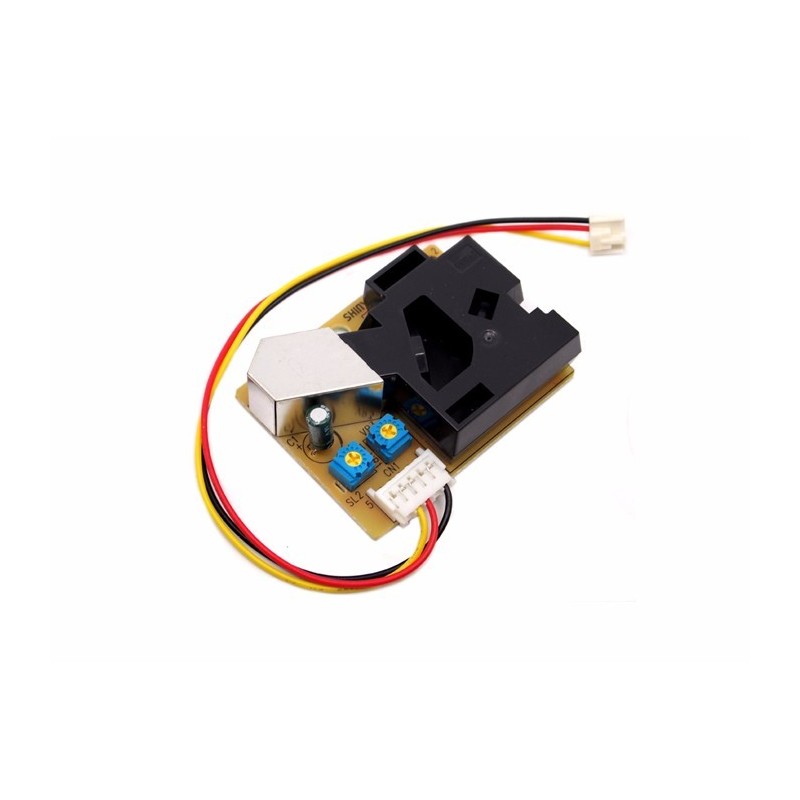
This Dust Sensor gives a good indication of the air quality in an environment by measuring the dust concentration. The Particulate Matter level (PM level) in the air is measured by counting the Low Pulse Occupancy time (LPO time) in given time unit. LPO time is proportional to PM concentration. This sensor can provide reliable data for air purifier systems; it is responsive to PM of diameter 1μm.
For all Grove users (especially beginners), we provide you guidance PDF documents. Please download and read through Preface - Getting StartedandIntroduction to Grove before your using of the product.
Note:
This sensor uses counting method to measure dust concentration, not weighing method, and the unit is pcs/L or pcs/0.01cf.
Please pay attention to the warnings listed here.
Features:
-
Grove compatible interface(extra wire with connecter)
-
Supply voltage range: 5V
-
Minimum detect particle: 1um
-
PWM output
-
Dimensions: 59(W)x45(H)x22(D) [mm]
Application Ideas:
-
Air Purifier
-
Air Quality Monitor
-
Air Conditioner
-
Ventilator