Apoyo al Cliente
Email: info@electrofun.pt


(SEM IVA 8.84€)
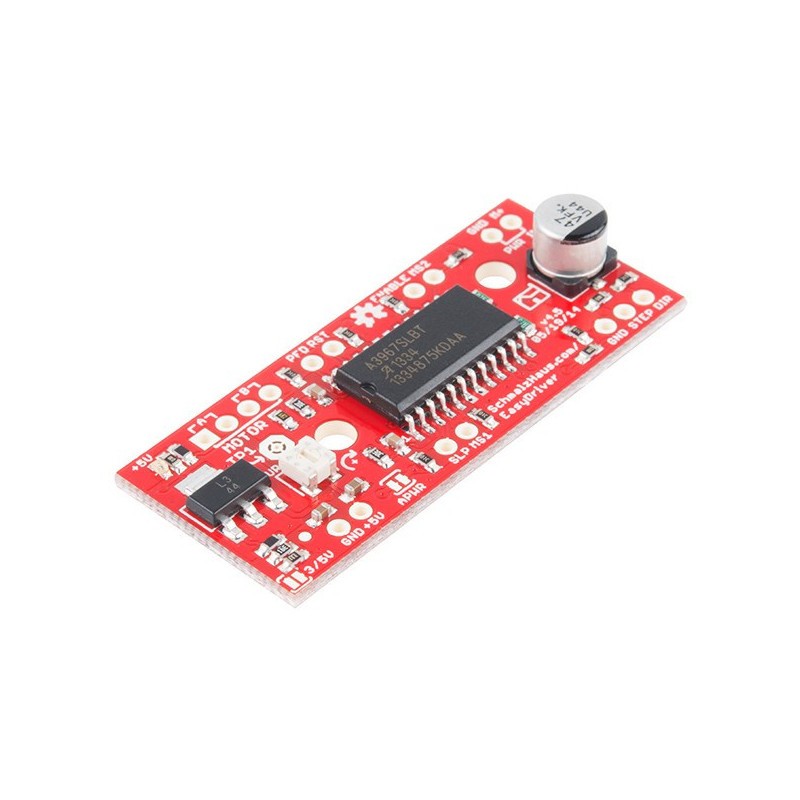
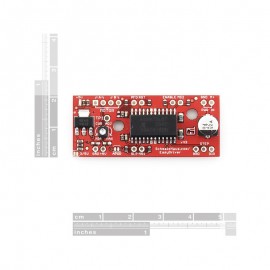
Controlador de motor paso a paso EasyDriver V44
El EasyDriver es un controlador de motor paso a paso fácil de usar, compatible con cualquier cosa que pueda generar un pulso digital de 0 a 5 V (o pulso de 0 a 3,3 V si suelda SJ2 cerrado en el EasyDriver). EasyDriver requiere un suministro de 7 V a 30 V para alimentar el motor y puede alimentar cualquier voltaje de motor paso a paso. El EasyDriver tiene un regulador de voltaje incorporado para la interfaz digital que se puede configurar en 5V o 3.3V. ¡Conecte un motor paso a paso de 4 cables y un microcontrolador y tendrá un control de motor de precisión! EasyDriver acciona motores bipolares y motores conectados como bipolares. Es decir. Motores paso a paso de 4, 6 u 8 hilos. En esta versión (v4.4) arreglamos el error de seda en el ajuste mínimo / máximo.Esta es la versión más reciente de EasyDriver V4 co-diseñada con Brian Schmalz. Proporciona mucha más flexibilidad y control sobre su motor paso a paso, en comparación con versiones anteriores. Los pines de selección de micropasos (MS1 y MS2) del A3967 están divididos, lo que permite realizar ajustes en la resolución de micropasos. Los pines de suspensión y habilitación también están separados para un mayor control.Nota: No conecte ni desconecte un motor mientras el controlador esté energizado. Esto provocará daños permanentes en el A3967 IC.caracteristicas:Controlador de micropasos A3967 Los pines MS1 y MS2 se separan para cambiar la resolución de micropasos a pasos completos, medios, cuartos y octavos (predeterminado en octavo) Compatible con motores paso a paso de 4, 6 y 8 cables de cualquier voltaje Control de corriente ajustable de 150 mA / fase a 750 mA / fase rango de suministro de 7V a 30V. Cuanto mayor es el voltaje, mayor es el par a altas velocidadesEjemplo:Problema: tengo un motor paso a paso pero no tengo los pines para el motor. ¿Cómo puedo determinar cómo cablear mi motor paso a paso sin los pines?Método 1 (usando un multímetro)Cada una de las dos fases debe tener la misma resistencia cuando se mide con un multímetro. Al medir la resistencia a través de un cable de cada una de las dos fases, la resistencia debe ser infinita porque el circuito está abierto. Localice los dos pares de cables que representan las dos fases; ambos pares de cables tendrán una resistencia interna similar.Conecte cada fase al amplificador e ignore la polaridad (+ / -), por ahora. Tienes un 50 por ciento de posibilidades de acertar.Envíe un comando para mover el motor. Si el motor gira en la dirección incorrecta, cambie la fase A y A- o B y B- (efectivamente invirtiendo las direcciones).Código://////////////////////////////////////////////////// ////////////////// © 2011 bildr // Publicado bajo la licencia MIT - Reutilice cambiar y compartir // Usando el paso a paso fácil con su arduino // use rotar y / o rotateDeg para controlar el motor paso a paso // la velocidad es cualquier número desde .01 -> 1 siendo 1 el más rápido - // Velocidad más lenta == Movimiento más fuerte ////////////////////// /////////////////////////////////////////////// # define DIR_PIN 2 # definir STEP_PIN 3void setup () {pinMode (DIR_PIN, SALIDA); pinMode (PASO_PIN, SALIDA); } void loop () {// rota un número específico de grados rotateDeg (360, 1); retraso (1000); rotateDeg (-360, .1); // retardo inverso (1000); // rotar un número específico de micropasos (8 micropasos por paso) // un paso a paso de 200 pasos tomaría 1600 micropasos para una rotación completa (1600, .5); retraso (1000); rotar (-1600, .25); // retardo inverso (1000); } void rotate (int steps, float speed) {// rota un número específico de micropasos (8 micropasos por paso) - (negativo para el movimiento inverso) // la velocidad es cualquier número entre .01 -> 1 siendo 1 el más rápido - Más lento es más fuerte int dir = (pasos> 0)? ALTA BAJA; pasos = abs (pasos); escritura digital (DIR_PIN, dir); float usDelay = (1 / velocidad) * 70; para (int i = 0; i <pasos; i ++) {digitalWrite (STEP_PIN, HIGH); delayMicroseconds (usDelay); digitalWrite (PASO_PIN, BAJO); delayMicroseconds (usDelay); }} void rotateDeg (float deg, float speed) {// gira un número específico de grados (negativo para el movimiento inverso) // la velocidad es cualquier número de .01 -> 1 siendo 1 el más rápido - Más lento es más fuerte int dir = ( grados> 0)? ALTA BAJA; escritura digital (DIR_PIN, dir); pasos int = abs (grados) * (1 / 0.225); float usDelay = (1 / velocidad) * 70; para (int i = 0; i <pasos; i ++) {digitalWrite (STEP_PIN, HIGH); delayMicroseconds (usDelay); digitalWrite (PASO_PIN, BAJO); delayMicroseconds (usDelay); }}
Incluye:
• 1x Controlador de motor paso a paso EasyDriver V44
Controlador de Motor DC Individual 15A
El SparkFun Pi Servo HAT permite que la Raspberry Pi controle hasta 16 servos motores de una manera sencilla y sin complicaciones a través de una conexión I2C.
Controlador de motor paso a paso EasyDriver V44