Client support
Email: info@electrofun.pt



(SEM IVA 16.75€)
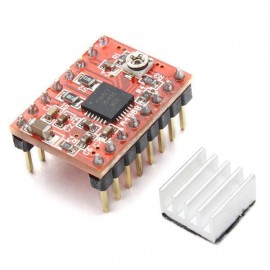
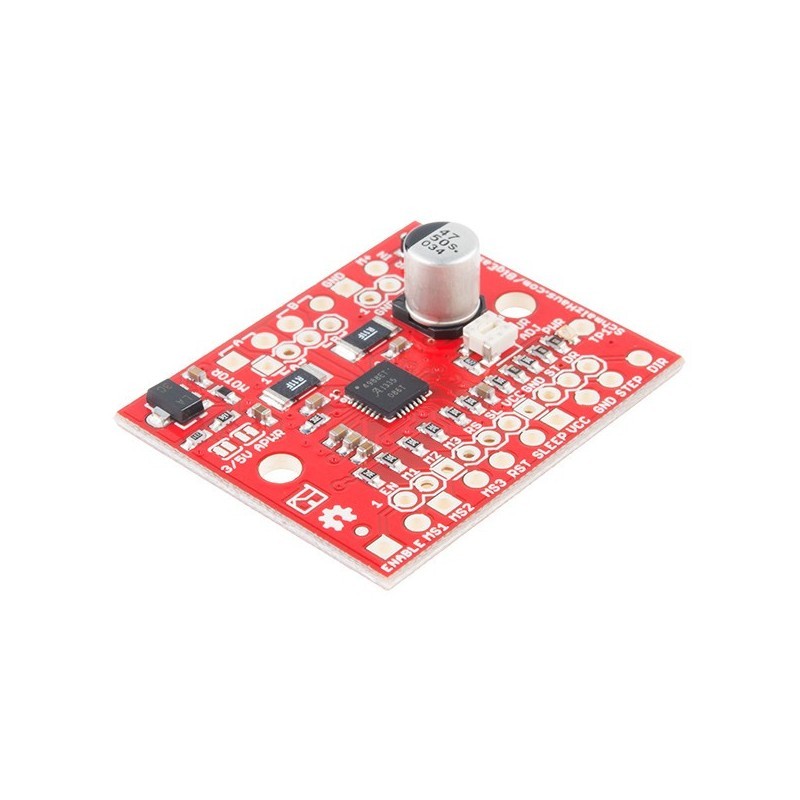
Big Easy Driver
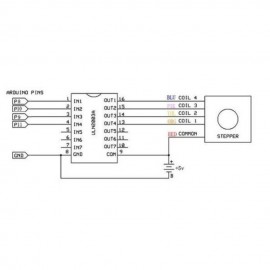
Designed by Brian Schmalz,Each BigEasyDriver can drive up to about 2A per phase of a bi-polar stepper motor. It is a chopper microstepping driver which defaults to 16 step microstepping mode. It can take a maximum motor drive voltage of around 35V, and includes on-board 5V/3.3V regulation, so only one supply is necessary. Although this board should be able to run most systems without active cooling, a heatsink is recommended for loads approaching 2A/phase. You can find the recommended heatsink in the related items below. Note: This product is a collaboration with Brian Schmalz. A portion of each sales goes back to him for product support and continued development. Features:Bi-polar Microstepping Driver2A/Phase Max1.4-1.7A/Phase w/o HeatsinkMax Motor Drive Voltage: 30VOn-board 5V/3.3V Regulation Documents:SchematicEagle FilesDatasheet (A4983)Design Site Library:Download AccelStepper Library Hooking it upEven though there are some 30 pins on the Big Easy Driver, we only need a few to get this up and running. In fact, a good deal of the pins are actually just duplicates that are spaced out differently. The barebones setup:Power the driver with 8-35v – If using a wall adapter, make sure the adapter has at least enough current for the motor. A higher current/amperage rating is better, and just means it wont burn out. (The Big Easy Driver can supply up to 2 amps)Connect the 3 control wires from the “gnd”, “dir”, and “step” of the Big Easy Driver to the Arduino as shown.Connect the stepper motor to the driver – For me the red/green were one pair, and the blue/yellow was another. If this does not work for you, see the section below on finding your motors coil pairs. CodeFor the arduino code for the driver, im going to be using AccelStepper Library. This is an amazing library that I use for all my stepper needs now. It is even does acceleration and deceleration, supports multiple drivers at once, and most importantly it is non blocking. Meaning, you can be moving your motor as you are reading from a sensor, or turning on lights etc.The library even keeps track of the position of the motor. So if you tell it to go to 10,000 – It knows it is at 9,00 already, so it moves an additional 1000 steps. Then you can tell it to go home, and it will go back 10,000 steps to 0. Additional Information: Finding Your Motors Coil PairsThis driver only needs 4 wires from your stepper. If you have a 4 wire stepper, awesome! If you have a 6 wire stepper, it will be slightly trickier. But no matter what, we need to find the 2 main coils inside of the motor. And if you get it wrong, the motor will just twitch or not move, but you wont break it. 4 wire motorUsing an ohmMeter, pick one wire at random, and test it with the others until you find a pair that shows resistance of a few ohms (1 – 200ohms most often). Those 2 are your “pair A”. Make sure the other 2 wires have the same resistance on them, (if not, it may be broken) and that is your “pair B”. With the two pairs of wires, there isnt a backwards, so just plug wires from “pair A” into the “A” on the driver, and “pair B” into “B”. 6 wire motorChecking the documents on the motor is the easiest, but if you dont have it, read on.6 wire motors have two coils in them just like 4 wire motors. But 6 wire motors also have extra wires that connects to the middle of each coil (centers). So each coil actually has 3 wires, a center and two ends. We don’t use coil center wires, we just need the 4 coil ends (2 from each coil).Basically, We need to find ends of the two coils. The ends of the coils will have twice the resistance as the center to an end. So we need two pairs of wire that have the highest resistance in the group.The easiest way to find out the right 4 wires is to look at the documentation for the motor, but if you dont have that, you can with some testing, find the right ones.To find the correct 2 wires, we need to locate the 3 wires from each coil. Start by just picking one at random, and using an ohmMeter, test the resistance with the others until you find the 2 connected to that wire. (3 of them will show no connection because they are part of the other coil). Now, these 3 are for coil “A”. Now, take these 3 wires and test the resistance between any 2 of them until find the 2 that have the highest resistance. These are the two ends of that coil “A”. Do the same for the other 3 wires to locate the ends of coil “B”.With the two pairs of wires, there isnt a backwards. So just plug wires from coil A into the A on the driver, and the two from coil B into b. 8 wire motorThere is no way to do this without looking at the documentation. MicrosteppingMost stepper drivers offer something called microstepping, and the Big Easy Driver is no exception. As I mentioned before, steppers have that minimum movement called a step. Microstepping breaks down that step into smaller micro steps. Microstepping allows for smoother, quieter, more accurate control, at slower speeds.When using microstepping, a step motor will require more “step pluses” to move the motor. For instance if you are using 16 microsteps (the default on the Big Easy Driver) per step, a 200 step motor would require 3200 “step pluses” to make a full revolution. Just take note when you wonder why telling it to step 200 steps barely rotates the motor.Microstepping will reduce the maximum speed / torque of the motor (about 30% less), so it is a trade of speed vs smooth. Because of this, many high end drivers switch to full stepping (no microstepping) at higher speeds, and technically, you could do that with the big easyDriver, but it’s too complex for me to figure out, so I wont be covering that. Adjusting the microsteppingThe Big Easy Driver defaults to 16 step microstepping mode. If you want to reduce that, you can do so by pulling the MS1, MS2, and MS3 pins HIGH (connecting them to 5V) or LOW (connecting them to GND). Check out the chart below to see how make the adjustments.
Includes:
• 1x Big Easy Driver
Encoder for Pololu Wheel 42x19mm
Big Easy Driver