Servo Motor com Raspberry Pico
Neste artigo iremos mostrar como controlar um motor servo com o Raspberry Pico, para acompanhar este post irá necessitar dos seguintes artigos:
| Imagem | Produto | Comprar |
|---|---|---|
|
|
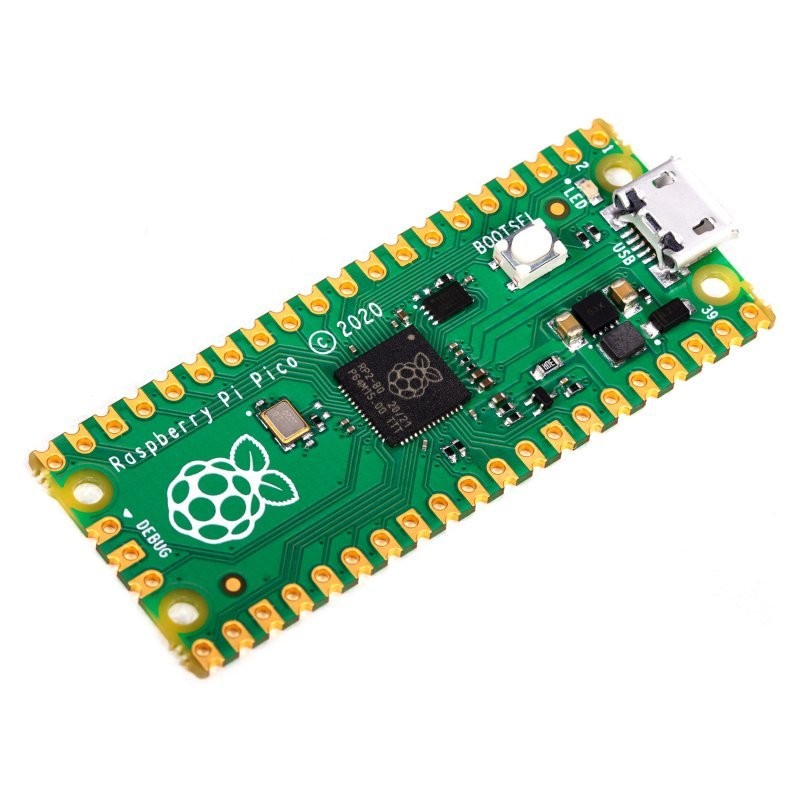
Raspberry Pico |
|
|
|
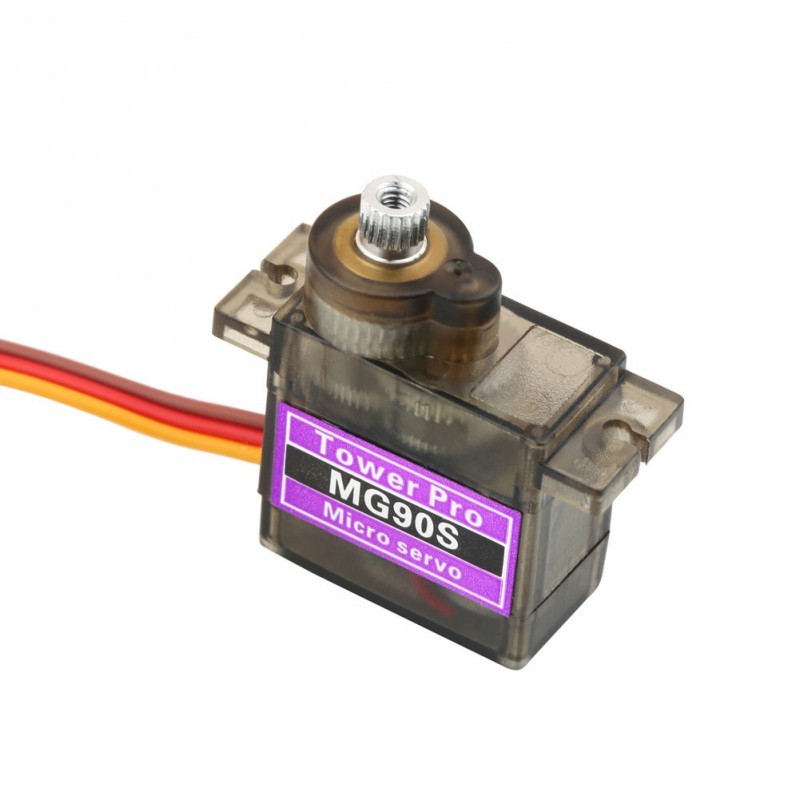
Servo Motor 180º |
|
|
|
Cabos Jumper Macho-Macho |

Importante
Sugerimos que consulte o nosso artigo em que ilustramos como proceder a correta configuração e preparação do Thonny IDE para programar o seu Raspberry Pico – Pode aceder aqui.
Adicionalmente, informamos que iremos usar o servo MGS90, contudo pode ser substituido por qualquer outro servo de 180º.
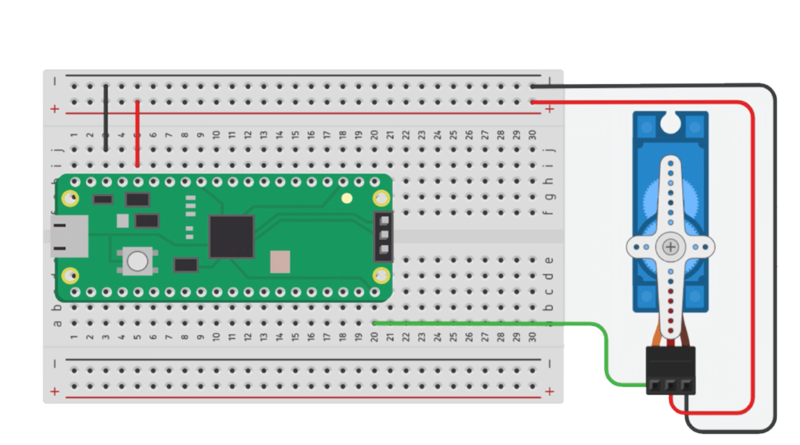
Esquema de Ligação
Código
import time
from machine import Pin, PWM
MIN_DUTY = 1000
MAX_DUTY = 9000
pwm = PWM(Pin(25))
pwm.freq(50)
duty = MIN_DUTY
direction = 1
while True:
for _ in range(1024):
duty += direction
if duty > MAX_DUTY:
duty = MAX_DUTY
direction = -direction
elif duty < MIN_DUTY:
duty = MIN_DUTY
direction = -direction
pwm.duty_u16(duty)
Para mais projetos, percorram o nosso blog, onde podem encontrar vários artigos interessantes relacionados com eletrónica, robótica e muito mais! Visitem também o nosso site, onde encontram tudo para eletrónica e robótica!


