Sensor PIR com Raspberry Pico
Neste artigo iremos demonstrar como utilizar o sensor PIR com o seu Raspberry Pico, para acompanhar este artigo irá necessitar dos seguintes artigos:
| Imagem | Produto | Comprar |
|---|---|---|
|
|
Raspberry Pico |
|
|
|
Sensor PIR |
|
|
|
Cabos Jumper Macho-Macho |


Importante
Sugerimos que consulte o nosso artigo anterior onde ilustramos como proceder a correta configuração e preparação do Thonny IDE para programar o seu Raspberry Pico – Pode aceder aqui.
Sobre o Sensor
O Sensor PIR consegue detetar o movimento de objetos que estejam numa área de até 7 metros, caso alguém se movimentar nessa área o pino de alarme é ativado.
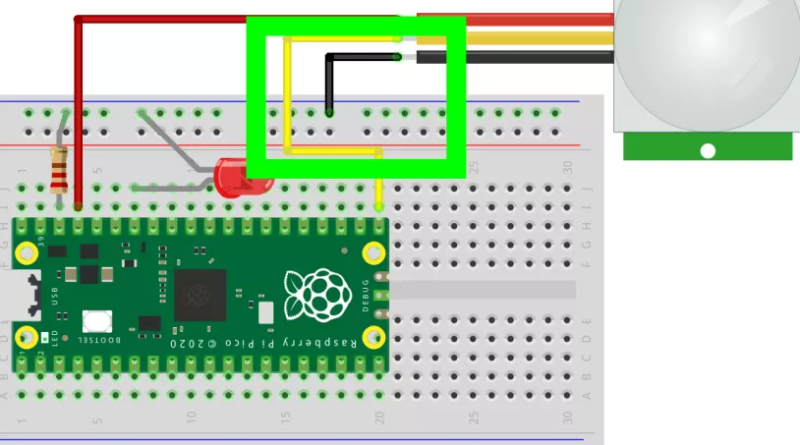
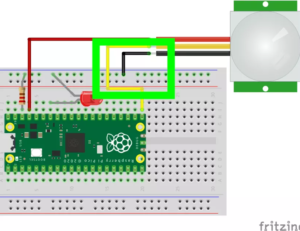
Para podermos utilizar o Sensor de Movimento para Arduino em primeiro lugar devemos alimentar o módulo com uma tensão de 5v ao GND e VCC. O pino DADOS refere-se ao sinal de saída que será ‘Alto’ se houver movimento ou ‘Baixo’ se não houver nenhum movimento.
Características:
- Sensor de movimento para Arduino;
- Sensor PIR;
- Realiza deteção através de sistema infravermelho;
- Deteta movimento numa área de até 7 metros;
- Raio de alcance de aproximadamente 100°;
- Ajuste do tempo e sensibilidade;
- Tempo máximo de 200 segundos;
- Possui proteção para o ponto sensorial infravermelho;
- Datasheet.
Código Utilizado
from machine import Pin
import time
led = Pin(28, Pin.OUT)
pir = Pin(16, Pin.IN, Pin.PULL_UP)
led.low()
time.sleep(3)
while True:
print(pir.value())
if pir.value() == 0:
print("Movimento Detetado!")
led.high()
time.sleep(5)
else:
print("Aguardar Movimento")
led.low()
time.sleep(0.2)
Atenção
Numa primeira utilização pode ser necessário ajustar os potenciómetros presentes no modulo para conseguir obter resultados mais precisos.
Para mais projetos, percorram o nosso blog, onde podem encontrar vários artigos interessantes relacionados com eletrónica, robótica e muito mais! Visitem também o nosso site, onde encontram tudo para eletrónica e robótica


