Curso Robótica – #9 – Expansor I/O, Servo
Estamos nos aproximando do final do curso de construção do robot, então é hora de discutir as outras possibilidades da nossa shield, que será útil durante o desenvolvimento dos robots!
Nós vamos lidar com um expansor de pinos e um conector para um servo.

Acréscimo 1: Controle Servo
O nosso robot é equipado com um sistema DRV que permite controlar dois motores DC. Além disso, podemos conecta-lo a outro servo de modelagem de unidade.
Em suma, essas unidades permitem movimentos precisos na faixa de 0-180º.
Os servomecanismos mais comuns são alimentados por volta de 5V. Cada motor (ou servo) recebe uma corrente relativamente alta que pode interferir na operação dos componentes eletrónicos. Portanto, é absolutamente impossível alimentar o servo com “5V”, que está nos pinos do Arduino.
Para a segurança do sistema, existe um estabilizador de voltagem adicional, que é responsável apenas pela fonte de alimentação do acionamento conectado ao conector SERVO. O sistema usado é o LM1117 na carcaça SOT223, que pode fornecer até 800mA de corrente. Este valor será suficiente para a maioria dos micro servos.

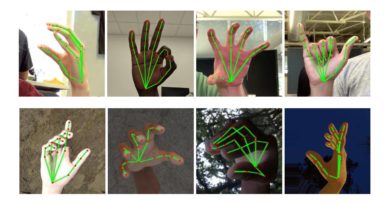
Primeiro, o cabo deve ser passado
e , em seguida, a unidade inteira (em um ângulo pequeno).
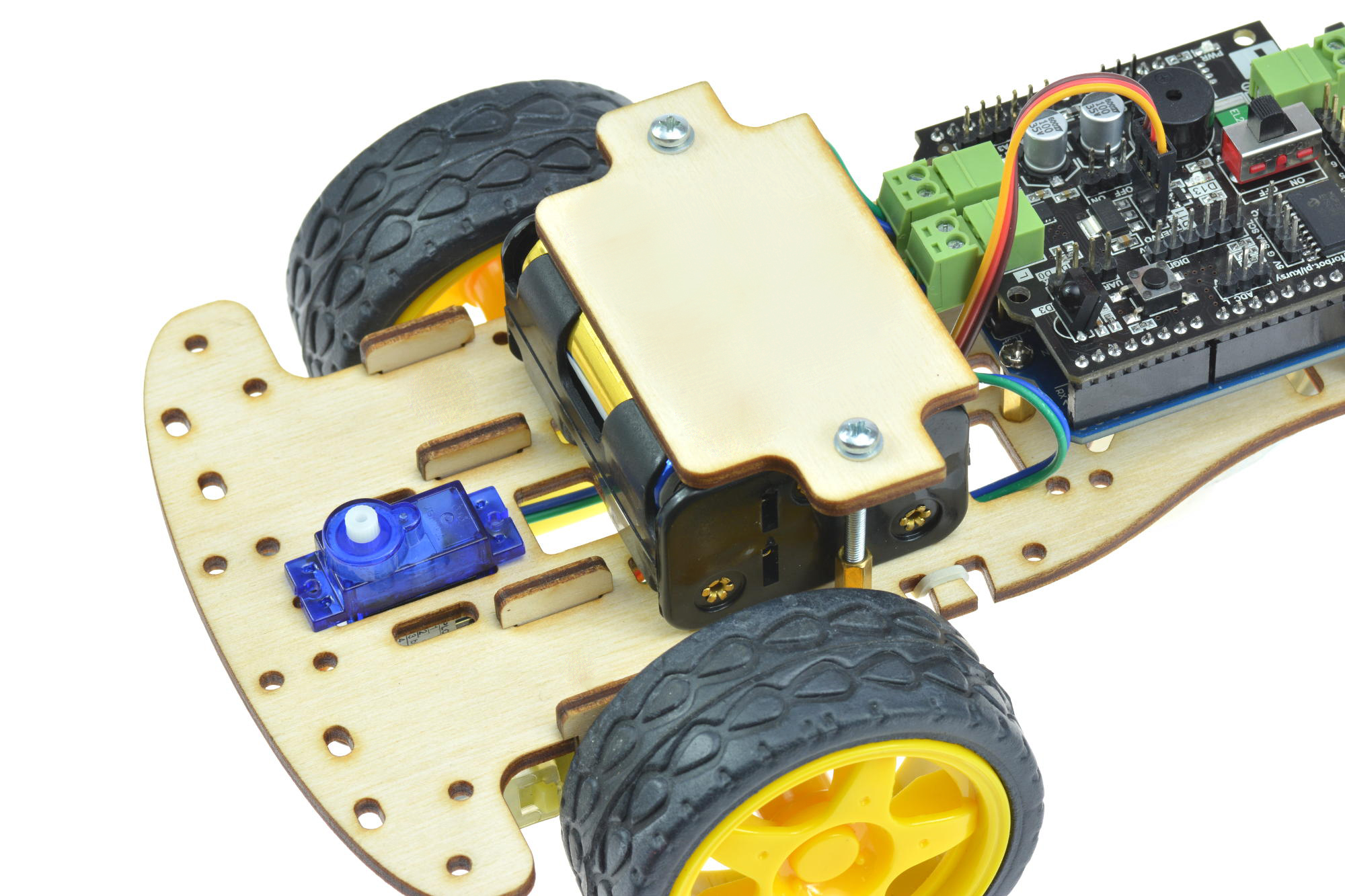
Então tem que anexar a unidade à base. Você pode fazer isso de várias maneiras. A maneira mais fácil é com um elástico (como na imagem abaixo). A segunda opção é o uso de pequenos parafusos ligados aos servos – eles podem ser parafusados no compensado.